publications
2024
-
 Real-Time Implementation of Differentiable Predictive Control on Embedded Microcontroller Hardware: A Case StudyJán Boldocký, Martin Gulan, Draguna Vrabie, and 1 more authorIFAC-PapersOnLine, 2024The 4th Modeling, Estimation, and Control Conference – 2024
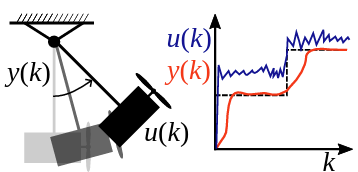
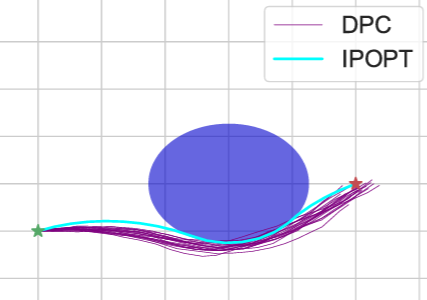
Real-Time Implementation of Differentiable Predictive Control on Embedded Microcontroller Hardware: A Case StudyJán Boldocký, Martin Gulan, Draguna Vrabie, and 1 more authorIFAC-PapersOnLine, 2024The 4th Modeling, Estimation, and Control Conference – 2024This paper presents the embedded implementation of differentiable predictive control (DPC) in a real-time control application with fast dynamics. DPC is a model-based policy optimization method that utilizes automatic differentiation to learn explicit control policies. The laboratory device features an aeropendulum mechatronic system equipped with a low-cost 32-bit microcontroller development board. We aimed to explore the possibilities of utilizing the DPC with linear and nonlinear dynamics models on lean hardware in a setpoint tracking application while satisfying the input and state constraints. The resulting control performance, memory footprint, and execution time are evaluated for different lengths of the prediction horizon.
@article{BOLDOCKY2024971, title = {Real-Time Implementation of Differentiable Predictive Control on Embedded Microcontroller Hardware: A Case Study}, journal = {IFAC-PapersOnLine}, volume = {58}, number = {28}, pages = {971-976}, year = {2024}, note = {The 4th Modeling, Estimation, and Control Conference – 2024}, issn = {2405-8963}, doi = {https://doi.org/10.1016/j.ifacol.2025.01.122}, author = {Boldocký, Ján and Gulan, Martin and Vrabie, Draguna and Drgoňa, Ján}, keywords = {differentiable predictive control, embedded control, neural network, microcontroller} } -
 Learning Constrained Parametric Differentiable Predictive Control Policies With GuaranteesJán Drgoňa, Aaron Tuor, and Draguna VrabieIEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024
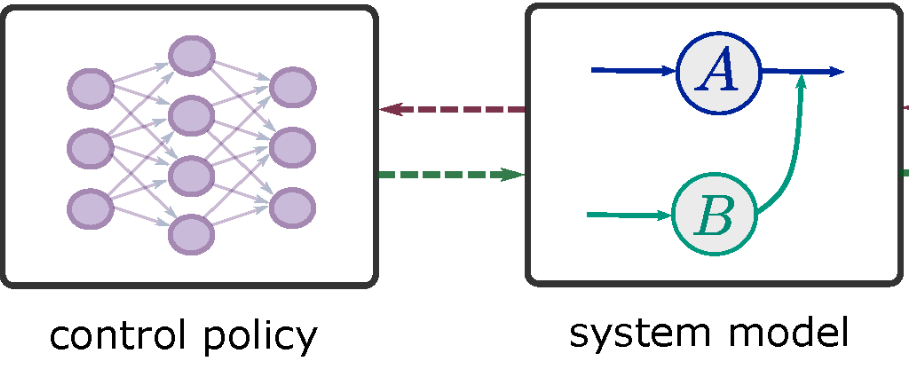
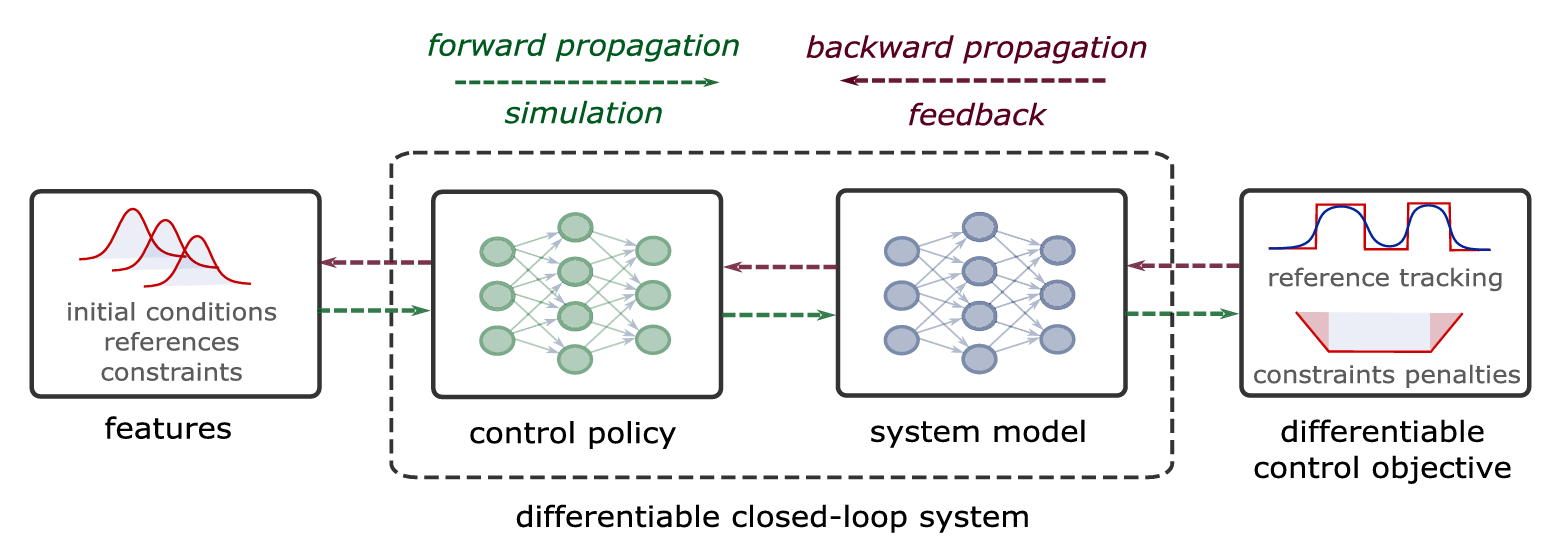
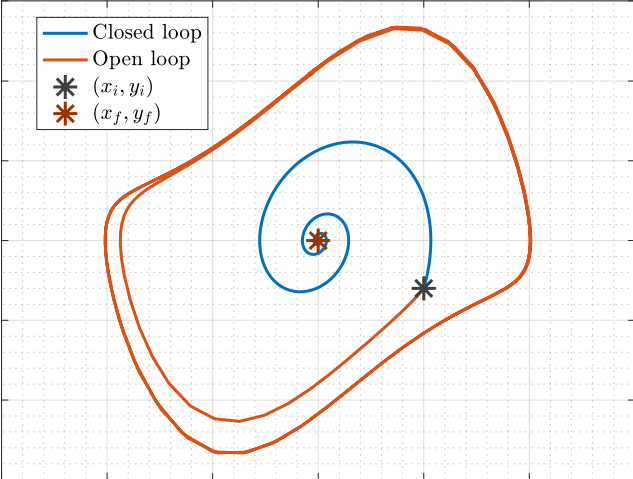
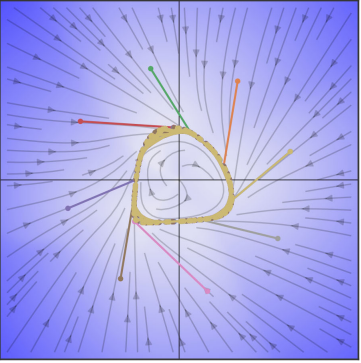
Learning Constrained Parametric Differentiable Predictive Control Policies With GuaranteesJán Drgoňa, Aaron Tuor, and Draguna VrabieIEEE Transactions on Systems, Man, and Cybernetics: Systems, 2024We present differentiable predictive control (DPC), a method for offline learning of constrained neural control policies for nonlinear dynamical systems with performance guarantees. We show that the sensitivities of the parametric optimal control problem can be used to obtain direct policy gradients. Specifically, we employ automatic differentiation (AD) to efficiently compute the sensitivities of the model predictive control (MPC) objective function and constraints penalties. To guarantee safety upon deployment, we derive probabilistic guarantees on closed-loop stability and constraint satisfaction based on indicator functions and Hoeffding’s inequality. We empirically demonstrate that the proposed method can learn neural control policies for various parametric optimal control tasks. In particular, we show that the proposed DPC method can stabilize systems with unstable dynamics, track time-varying references, and satisfy nonlinear state and input constraints. Our DPC method has practical time savings compared to alternative approaches for fast and memory-efficient controller design. Specifically, DPC does not depend on a supervisory controller as opposed to approximate MPC based on imitation learning. We demonstrate that, without losing performance, DPC is scalable with greatly reduced demands on memory and computation compared to implicit and explicit MPC while being more sample efficient than model-free reinforcement learning (RL) algorithms.
@article{Drgona2024_DPC, author = {Drgoňa, Ján and Tuor, Aaron and Vrabie, Draguna}, journal = {IEEE Transactions on Systems, Man, and Cybernetics: Systems}, title = {Learning Constrained Parametric Differentiable Predictive Control Policies With Guarantees}, year = {2024}, volume = {54}, number = {6}, pages = {3596-3607}, keywords = {Predictive control;Optimization;Computational modeling;Programming;Sensitivity;Optimal control;Closed loop systems;Differentiable programming;learning for control;parametric optimal control;policy optimization (PO)}, doi = {10.1109/TSMC.2024.3368026} } -
 Physics-constrained graph modeling for building thermal dynamicsZiyao Yang, Amol D. Gaidhane, Ján Drgoňa, and 4 more authorsEnergy and AI, 2024
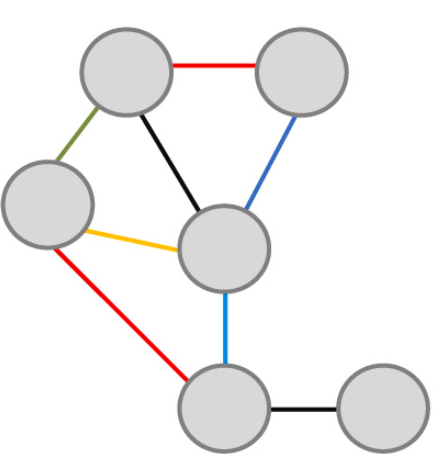
Physics-constrained graph modeling for building thermal dynamicsZiyao Yang, Amol D. Gaidhane, Ján Drgoňa, and 4 more authorsEnergy and AI, 2024In this paper, we propose a graph model embedded with compact physical equations for modeling the thermal dynamics of buildings. The principles of heat flow across various components in the building, such as walls and doors, fit the message-passing strategy used by Graph Neural networks (GNNs). The proposed method is to represent the multi-zone building as a graph, in which only zones are considered as nodes, and any heat flow between zones is modeled as an edge based on prior knowledge of the building structure. Furthermore, the thermal dynamics of these components are described by compact models in the graph. GNNs are further employed to train model parameters from collected data. During model training, our proposed method enforces physical constraints (e.g., zone sizes and connections) on model parameters and propagates the penalty in the loss function of GNN. Such constraints are essential to ensure model robustness and interpretability. We evaluate the effectiveness of the proposed modeling approach on a realistic dataset with multiple zones. The results demonstrate a satisfactory accuracy in the prediction of multi-zone temperature. Moreover, we illustrate that the new model can reliably learn hidden physical parameters with incomplete data.
@article{YANG2024100346, title = {Physics-constrained graph modeling for building thermal dynamics}, journal = {Energy and AI}, volume = {16}, pages = {100346}, year = {2024}, issn = {2666-5468}, doi = {https://doi.org/10.1016/j.egyai.2024.100346}, author = {Yang, Ziyao and Gaidhane, Amol D. and Drgoňa, Ján and Chandan, Vikas and Halappanavar, Mahantesh M. and Liu, Frank and Cao, Yu}, keywords = {Physics-constrained learning, Graph Neural Networks, Compact model, Building thermal dynamics} } -
 Finding MIDDLE Ground: Scalable and Secure Distributed LearningMarco Bornstein, Nawaf Nazir, Jan Drgona, and 2 more authorsIn Proceedings of the 33rd ACM International Conference on Information and Knowledge Management, 2024
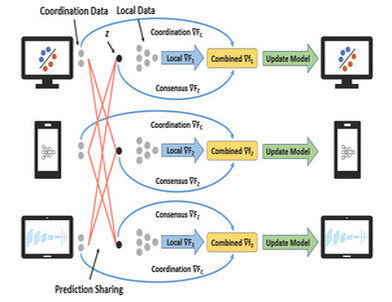
Finding MIDDLE Ground: Scalable and Secure Distributed LearningMarco Bornstein, Nawaf Nazir, Jan Drgona, and 2 more authorsIn Proceedings of the 33rd ACM International Conference on Information and Knowledge Management, 2024Edge-computing methods allow devices to efficiently train a high-performing, robust, and personalized model for predictive tasks. However, these methods succumb to privacy and scalability concerns such as adversarial data recovery and expensive model communication. Furthermore, edge computing methods unrealistically assume that all devices train an identical model. In practice, edge devices have varying computational and memory constraints, which may not allow certain devices to have the space or speed to train a specific model. To overcome these issues, we propose MIDDLE, a model-independent distributed learning algorithm that allows heterogeneous edge devices to assist each other in training while communicating only non-sensitive information. MIDDLE unlocks the ability for edge devices, regardless of computational or memory constraints, to assist each other even with completely different model architectures. Furthermore, MIDDLE does not require model or gradient communication, significantly reducing communication size and time. We prove that MIDDLE attains the optimal convergence rate of stochastic gradient descent for convex and non-convex smooth optimization. Finally, our experimental results demonstrate that MIDDLE attains robust and high-performing models without model or gradient communication.
@inproceedings{Bornstein2024, author = {Bornstein, Marco and Nazir, Nawaf and Drgona, Jan and Kundu, Soumya and Adetola, Veronica}, title = {Finding MIDDLE Ground: Scalable and Secure Distributed Learning}, year = {2024}, isbn = {9798400704369}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, doi = {10.1145/3627673.3679587}, booktitle = {Proceedings of the 33rd ACM International Conference on Information and Knowledge Management}, pages = {141–151}, numpages = {11}, keywords = {anomaly detection, distributed machine learning, privacy preserving, scalable algorithms}, location = {Boise, ID, USA}, series = {CIKM '24} } -
 Learning to Optimize for Mixed-Integer Non-linear ProgrammingBo Tang, Elias B. Khalil, and Ján Drgoňa2024
Learning to Optimize for Mixed-Integer Non-linear ProgrammingBo Tang, Elias B. Khalil, and Ján Drgoňa2024@misc{tang2024, title = {Learning to Optimize for Mixed-Integer Non-linear Programming}, author = {Tang, Bo and Khalil, Elias B. and Drgoňa, Ján}, year = {2024}, eprint = {2410.11061}, archiveprefix = {arXiv}, primaryclass = {cs.LG}, } -
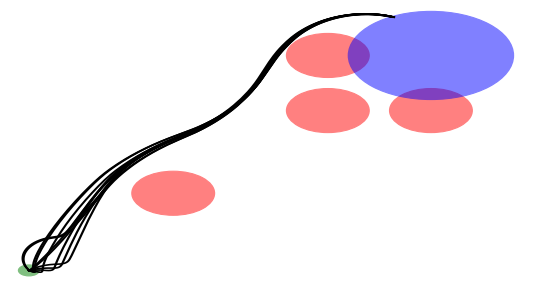
 Differentiable Predictive Control for Robotics: A Data-Driven Predictive Safety Filter ApproachJohn Viljoen, Wenceslao Shaw Cortez, Jan Drgona, and 3 more authors2024
Differentiable Predictive Control for Robotics: A Data-Driven Predictive Safety Filter ApproachJohn Viljoen, Wenceslao Shaw Cortez, Jan Drgona, and 3 more authors2024@misc{viljoen2024, title = {Differentiable Predictive Control for Robotics: A Data-Driven Predictive Safety Filter Approach}, author = {Viljoen, John and Cortez, Wenceslao Shaw and Drgona, Jan and East, Sebastian and Tomizuka, Masayoshi and Vrabie, Draguna}, year = {2024}, eprint = {2409.13817}, archiveprefix = {arXiv}, primaryclass = {cs.RO}, } -
 Differentiable Predictive Control for Large-Scale Urban Road NetworksRenukanandan Tumu, Wenceslao Shaw Cortez, Ján Drgoňa, and 2 more authors2024
Differentiable Predictive Control for Large-Scale Urban Road NetworksRenukanandan Tumu, Wenceslao Shaw Cortez, Ján Drgoňa, and 2 more authors2024@misc{tumu2024differentiablepredictivecontrollargescale, title = {Differentiable Predictive Control for Large-Scale Urban Road Networks}, author = {Tumu, Renukanandan and Cortez, Wenceslao Shaw and Drgoňa, Ján and Vrabie, Draguna L. and Glavaski, Sonja}, year = {2024}, eprint = {2406.10433}, archiveprefix = {arXiv}, primaryclass = {eess.SY}, } -
 Metric Learning to Accelerate Convergence of Operator Splitting Methods for Differentiable Parametric ProgrammingEthan King, James Kotary, Ferdinando Fioretto, and 1 more author2024
Metric Learning to Accelerate Convergence of Operator Splitting Methods for Differentiable Parametric ProgrammingEthan King, James Kotary, Ferdinando Fioretto, and 1 more author2024@misc{king2024metriclearningaccelerateconvergence, title = {Metric Learning to Accelerate Convergence of Operator Splitting Methods for Differentiable Parametric Programming}, author = {King, Ethan and Kotary, James and Fioretto, Ferdinando and Drgona, Jan}, year = {2024}, eprint = {2404.00882}, archiveprefix = {arXiv}, primaryclass = {cs.LG}, } -
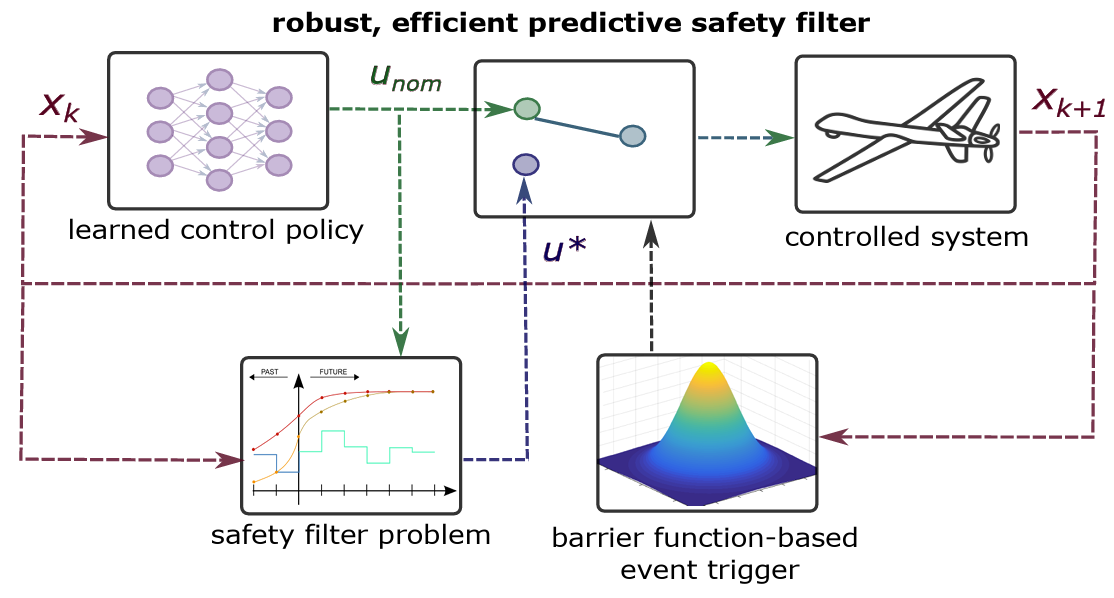 A Robust, Efficient Predictive Safety FilterWenceslao Shaw Cortez, Ján Drgoňa, Draguna Vrabie, and 1 more author2024
A Robust, Efficient Predictive Safety FilterWenceslao Shaw Cortez, Ján Drgoňa, Draguna Vrabie, and 1 more author2024@misc{cortez2023robust, title = {A Robust, Efficient Predictive Safety Filter}, author = {Cortez, Wenceslao Shaw and Drgoňa, Ján and Vrabie, Draguna and Halappanavar, Mahantesh}, year = {2024}, eprint = {2311.08496}, archiveprefix = {arXiv}, primaryclass = {cs.SY}, } -
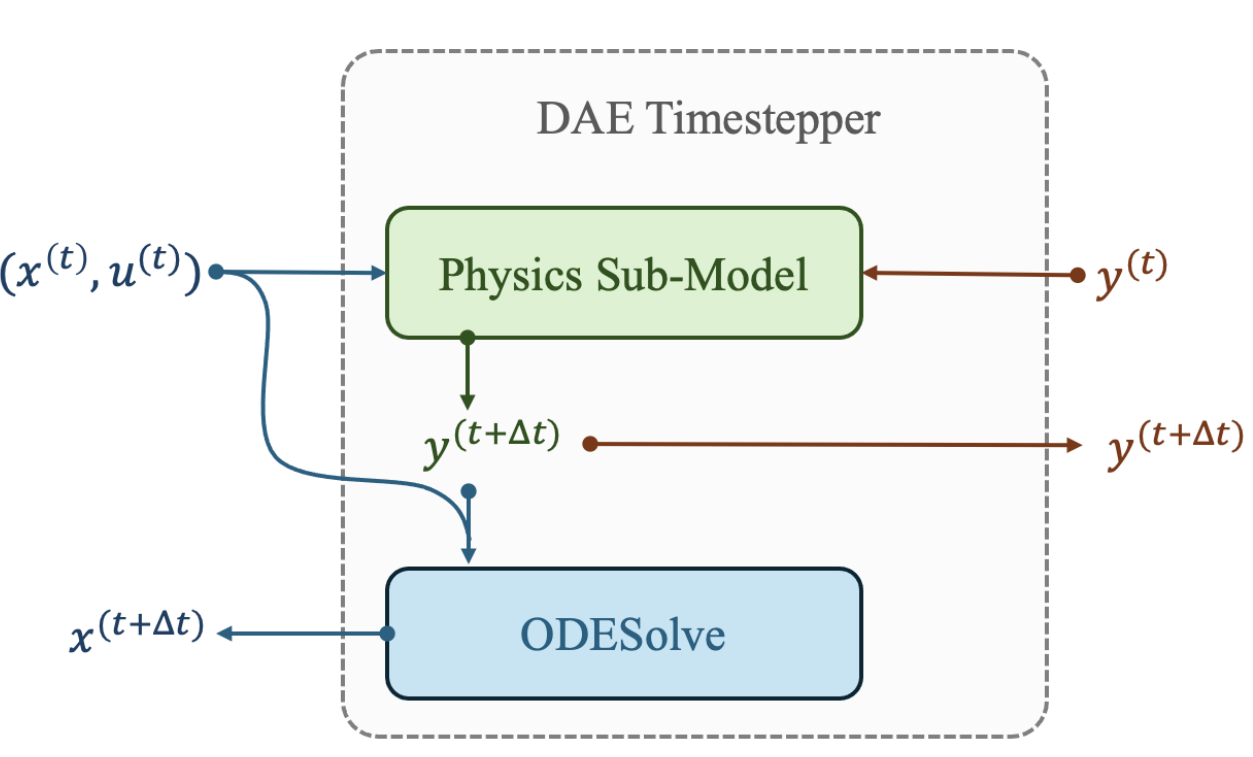 Neural Differential Algebraic EquationsJames Koch, Madelyn Shapiro, Himanshu Sharma, and 2 more authors2024
Neural Differential Algebraic EquationsJames Koch, Madelyn Shapiro, Himanshu Sharma, and 2 more authors2024@misc{koch2024neuraldifferentialalgebraicequations, title = {Neural Differential Algebraic Equations}, author = {Koch, James and Shapiro, Madelyn and Sharma, Himanshu and Vrabie, Draguna and Drgona, Jan}, year = {2024}, eprint = {2403.12938}, archiveprefix = {arXiv}, primaryclass = {cs.LG}, } -
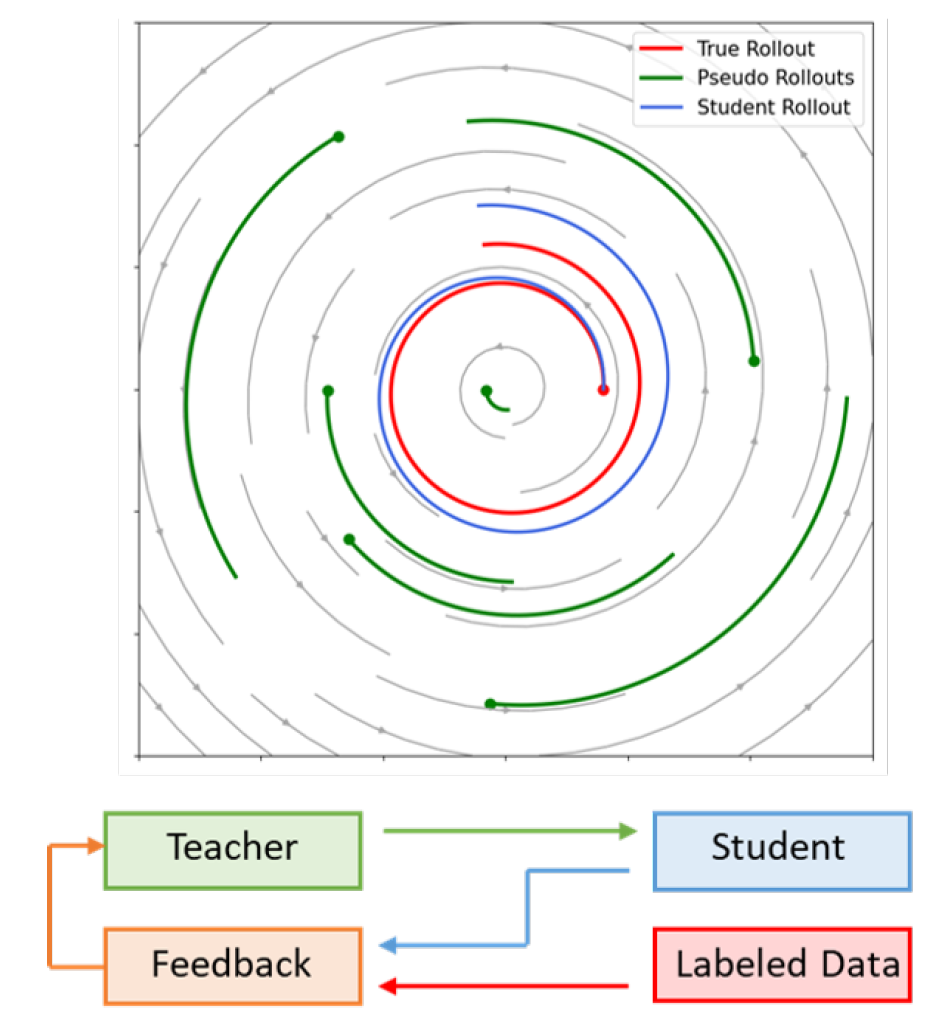 Semi-supervised Learning of Dynamical Systems with Neural Ordinary Differential Equations: A Teacher-Student Model ApproachYu Wang, Yuxuan Yin, Karthik Somayaji NS, and 5 more authorsProceedings of the AAAI Conference on Artificial Intelligence, Mar 2024
Semi-supervised Learning of Dynamical Systems with Neural Ordinary Differential Equations: A Teacher-Student Model ApproachYu Wang, Yuxuan Yin, Karthik Somayaji NS, and 5 more authorsProceedings of the AAAI Conference on Artificial Intelligence, Mar 2024Modeling dynamical systems is crucial for a wide range of tasks, but it remains challenging due to complex nonlinear dynamics, limited observations, or lack of prior knowledge. Recently, data-driven approaches such as Neural Ordinary Differential Equations (NODE) have shown promising results by leveraging the expressive power of neural networks to model unknown dynamics. However, these approaches often suffer from limited labeled training data, leading to poor generalization and suboptimal predictions. On the other hand, semi-supervised algorithms can utilize abundant unlabeled data and have demonstrated good performance in classification and regression tasks. We propose TS-NODE, the first semi-supervised approach to modeling dynamical systems with NODE. TS-NODE explores cheaply generated synthetic pseudo rollouts to broaden exploration in the state space and to tackle the challenges brought by lack of ground-truth system data under a teacher-student model. TS-NODE employs an unified optimization framework that corrects the teacher model based on the student’s feedback while mitigating the potential false system dynamics present in pseudo rollouts. TS-NODE demonstrates significant performance improvements over a baseline Neural ODE model on multiple dynamical system modeling tasks.
@article{wang2023semisupervised, title = {Semi-supervised Learning of Dynamical Systems with Neural Ordinary Differential Equations: A Teacher-Student Model Approach}, volume = {38}, url = {https://ojs.aaai.org/index.php/AAAI/article/view/29498}, doi = {10.1609/aaai.v38i14.29498}, number = {14}, journal = {Proceedings of the AAAI Conference on Artificial Intelligence}, author = {Wang, Yu and Yin, Yuxuan and NS, Karthik Somayaji and Drgoňa, Ján and Schram, Malachi and Halappanavar, Mahantesh and Liu, Frank and Li, Peng}, year = {2024}, month = mar, pages = {15698-15705} } -
 Extreme Risk Mitigation in Reinforcement Learning using Extreme Value TheoryKarthik Somayaji NS, Yu Wang, Malachi Schram, and 4 more authorsTransactions on Machine Learning Research, Mar 2024
Extreme Risk Mitigation in Reinforcement Learning using Extreme Value TheoryKarthik Somayaji NS, Yu Wang, Malachi Schram, and 4 more authorsTransactions on Machine Learning Research, Mar 2024Risk-sensitive reinforcement learning (RL) has garnered significant attention in recent years due to the growing interest in deploying RL agents in real-world scenarios. A critical aspect of risk awareness involves modelling highly rare risk events (rewards) that could potentially lead to catastrophic outcomes. These infrequent occurrences present a formidable challenge for data-driven methods aiming to capture such risky events accurately. While risk-aware RL techniques do exist, they suffer from high variance estimation due to the inherent data scarcity. Our work proposes to enhance the resilience of RL agents when faced with very rare and risky events by focusing on refining the predictions of the extreme values predicted by the state-action value distribution. To achieve this, we formulate the extreme values of the state-action value function distribution as parameterized distributions, drawing inspiration from the principles of extreme value theory (EVT). We propose an extreme value theory based actor-critic approach, namely, Extreme Valued Actor-Critic (EVAC) which effectively addresses the issue of infrequent occurrence by leveraging EVT-based parameterization. Importantly, we theoretically demonstrate the advantages of employing these parameterized distributions in contrast to other risk-averse algorithms. Our evaluations show that the proposed method outperforms other risk averse RL algorithms on a diverse range of benchmark tasks, each encompassing distinct risk scenarios.
@article{ns2024extreme, title = {Extreme Risk Mitigation in Reinforcement Learning using Extreme Value Theory}, author = {NS, Karthik Somayaji and Wang, Yu and Schram, Malachi and Drgona, Jan and Halappanavar, Mahantesh M and Liu, Frank and Li, Peng}, journal = {Transactions on Machine Learning Research}, issn = {2835-8856}, year = {2024}, } -
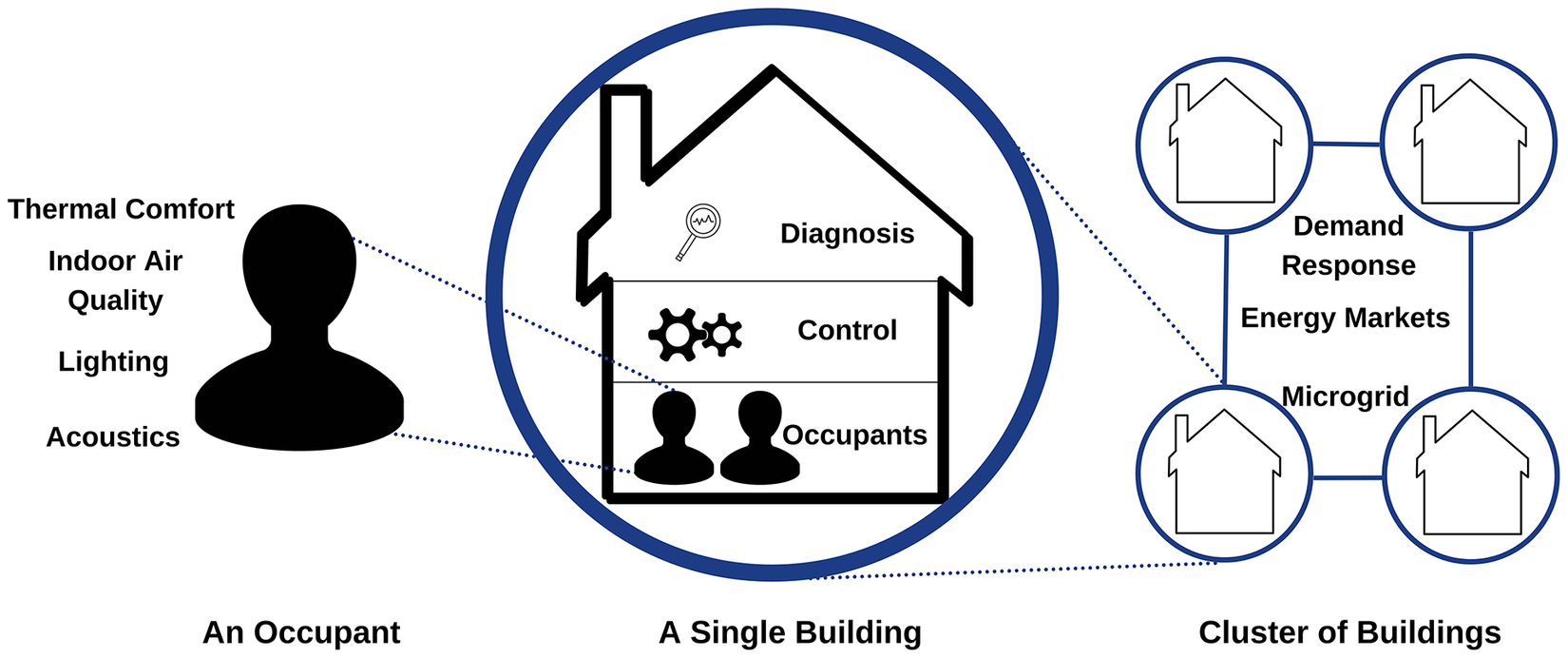 Machine Learning for Smart and Energy-Efficient BuildingsHari Prasanna Das, Yu-Wen Lin, Utkarsha Agwan, and 7 more authorsEnvironmental Data Science, Mar 2024
Machine Learning for Smart and Energy-Efficient BuildingsHari Prasanna Das, Yu-Wen Lin, Utkarsha Agwan, and 7 more authorsEnvironmental Data Science, Mar 2024Energy consumption in buildings, both residential and commercial, accounts for approximately 40% of all energy usage in the United States, and similar numbers are being reported from countries around the world. This significant amount of energy is used to maintain a comfortable, secure, and productive environment for the occupants. So, it is crucial that energy consumption in buildings must be optimized, all the while maintaining satisfactory levels of occupant comfort, health, and safety. Machine learning (ML) has been proven to be an invaluable tool in deriving important insights from data and optimizing various systems. In this work, we review some of the most promising ways in which ML has been leveraged to make buildings smart and energy-efficient. For the convenience of readers, we provide a brief introduction to the relevant ML paradigms and the components and functioning of each smart building system we cover. Finally, we discuss the challenges faced while implementing machine learning algorithms in smart buildings and provide future avenues for research in this field.
@article{Das_2024, title = {Machine Learning for Smart and Energy-Efficient Buildings}, volume = {3}, doi = {10.1017/eds.2023.43}, journal = {Environmental Data Science}, author = {Das, Hari Prasanna and Lin, Yu-Wen and Agwan, Utkarsha and Spangher, Lucas and Devonport, Alex and Yang, Yu and Drgoňa, Ján and Chong, Adrian and Schiavon, Stefano and Spanos, Costas J.}, year = {2024}, pages = {e1} }













2023
-
 Neuro-physical dynamic load modeling using differentiable parametric optimizationShrirang Abhyankar, Ján Drgoňa, Aaron Tuor, and 1 more authorIn 2023 IEEE Power & Energy Society General Meeting (PESGM), Mar 2023
Neuro-physical dynamic load modeling using differentiable parametric optimizationShrirang Abhyankar, Ján Drgoňa, Aaron Tuor, and 1 more authorIn 2023 IEEE Power & Energy Society General Meeting (PESGM), Mar 2023@inproceedings{10253098, author = {Abhyankar, Shrirang and Drgoňa, Ján and Tuor, Aaron and August, Andrew}, booktitle = {2023 IEEE Power & Energy Society General Meeting (PESGM)}, title = {Neuro-physical dynamic load modeling using differentiable parametric optimization}, year = {2023}, volume = {}, number = {}, pages = {1-5}, doi = {10.1109/PESGM52003.2023.10253098}, } -
 AutoNF: Automated Architecture Optimization of Normalizing Flows with Unconstrained Continuous Relaxation Admitting Optimal Discrete SolutionYu Wang, Ján Drgoňa, Jiaxin Zhang, and 4 more authorsProceedings of the AAAI Conference on Artificial Intelligence, Jun 2023
AutoNF: Automated Architecture Optimization of Normalizing Flows with Unconstrained Continuous Relaxation Admitting Optimal Discrete SolutionYu Wang, Ján Drgoňa, Jiaxin Zhang, and 4 more authorsProceedings of the AAAI Conference on Artificial Intelligence, Jun 2023Normalizing flows (NF) build upon invertible neural networks and have wide applications in probabilistic modeling. Currently, building a powerful yet computationally efficient flow model relies on empirical fine-tuning over a large design space. While introducing neural architecture search (NAS) to NF is desirable, the invertibility constraint of NF brings new challenges to existing NAS methods whose application is limited to unstructured neural networks. Developing efficient NAS methods specifically for NF remains an open problem. We present AutoNF, the first automated NF architectural optimization framework. First, we present a new mixture distribution formulation that allows efficient differentiable architecture search of flow models without violating the invertibility constraint. Second, under the new formulation, we convert the original NP-hard combinatorial NF architectural optimization problem to an unconstrained continuous relaxation admitting the discrete optimal architectural solution, circumventing the loss of optimality due to binarization in architectural optimization. We evaluate AutoNF with various density estimation datasets and show its superior performance-cost trade-offs over a set of existing hand-crafted baselines.
@article{AutoNF_2023, title = {{AutoNF: Automated Architecture Optimization of Normalizing Flows with Unconstrained Continuous Relaxation Admitting Optimal Discrete Solution}}, volume = {37}, url = {https://ojs.aaai.org/index.php/AAAI/article/view/26220}, doi = {10.1609/aaai.v37i8.26220}, number = {8}, journal = {Proceedings of the AAAI Conference on Artificial Intelligence}, author = {Wang, Yu and Drgoňa, Ján and Zhang, Jiaxin and Nanjangud Suryanarayana, Karthik Somayaji and Schram, Malachi and Liu, Frank and Li, Peng}, year = {2023}, month = jun, pages = {10244-10252} } - ACCPhysics-Informed Machine Learning for Modeling and Control of Dynamical SystemsTruong X. Nghiem, Ján Drgoňa, Colin Jones, and 10 more authorsIn 2023 American Control Conference (ACC), Jun 2023
@inproceedings{10155901, author = {Nghiem, Truong X. and Drgoňa, Ján and Jones, Colin and Nagy, Zoltan and Schwan, Roland and Dey, Biswadip and Chakrabarty, Ankush and Di Cairano, Stefano and Paulson, Joel A. and Carron, Andrea and Zeilinger, Melanie N. and Shaw Cortez, Wenceslao and Vrabie, Draguna L.}, booktitle = {2023 American Control Conference (ACC)}, title = {Physics-Informed Machine Learning for Modeling and Control of Dynamical Systems}, year = {2023}, volume = {}, number = {}, pages = {3735-3750}, doi = {10.23919/ACC55779.2023.10155901} } - ACCData-Driven Control: Theory and ApplicationsDamoon Soudbakhsh, Anuradha M. Annaswamy, Yan Wang, and 6 more authorsIn 2023 American Control Conference (ACC), Jun 2023
@inproceedings{10156081, author = {Soudbakhsh, Damoon and Annaswamy, Anuradha M. and Wang, Yan and Brunton, Steven L. and Gaudio, Joseph and Hussain, Heather and Vrabie, Draguna and Drgoňa, Ján and Filev, Dimitar}, booktitle = {2023 American Control Conference (ACC)}, title = {Data-Driven Control: Theory and Applications}, year = {2023}, volume = {}, number = {}, pages = {1922-1939}, doi = {10.23919/ACC55779.2023.10156081} } - Ten questions concerning reinforcement learning for building energy managementZoltan Nagy, Gregor Henze, Sourav Dey, and 22 more authorsBuilding and Environment, Jun 2023
As buildings account for approximately 40% of global energy consumption and associated greenhouse gas emissions, their role in decarbonizing the power grid is crucial. The increased integration of variable energy sources, such as renewables, introduces uncertainties and unprecedented flexibilities, necessitating buildings to adapt their energy demand to enhance grid resiliency. Consequently, buildings must transition from passive energy consumers to active grid assets, providing demand flexibility and energy elasticity while maintaining occupant comfort and health. This fundamental shift demands advanced optimal control methods to manage escalating energy demand and avert power outages. Reinforcement learning (RL) emerges as a promising method to address these challenges. In this paper, we explore ten questions related to the application of RL in buildings, specifically targeting flexible energy management. We consider the growing availability of data, advancements in machine learning algorithms, open-source tools, and the practical deployment aspects associated with software and hardware requirements. Our objective is to deliver a comprehensive introduction to RL, present an overview of existing research and accomplishments, underscore the challenges and opportunities, and propose potential future research directions to expedite the adoption of RL for building energy management.
@article{NAGY2023110435, title = {Ten questions concerning reinforcement learning for building energy management}, journal = {Building and Environment}, volume = {241}, pages = {110435}, year = {2023}, issn = {0360-1323}, doi = {https://doi.org/10.1016/j.buildenv.2023.110435}, url = {https://www.sciencedirect.com/science/article/pii/S0360132323004626}, author = {Nagy, Zoltan and Henze, Gregor and Dey, Sourav and Arroyo, Javier and Helsen, Lieve and Zhang, Xiangyu and Chen, Bingqing and Amasyali, Kadir and Kurte, Kuldeep and Zamzam, Ahmed and Zandi, Helia and Drgoňa, Ján and Quintana, Matias and McCullogh, Steven and Park, June Young and Li, Han and Hong, Tianzhen and Brandi, Silvio and Pinto, Giuseppe and Capozzoli, Alfonso and Vrabie, Draguna and Bergés, Mario and Nweye, Kingsley and Marzullo, Thibault and Bernstein, Andrey}, keywords = {Open AI Gym} } - ACM e-EnergyPower Grid Behavioral Patterns and Risks of Generalization in Applied Machine LearningShimiao Li, Ján Drgoňa, Shrirang Abhyankar, and 1 more authorIn Companion Proceedings of the 14th ACM International Conference on Future Energy Systems, Jun 2023
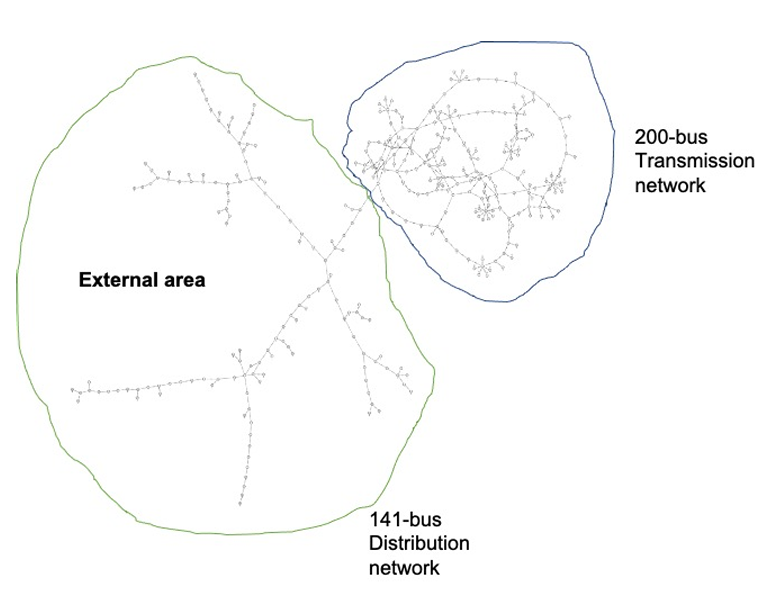
Recent years have seen a rich literature of data-driven approaches designed for power grid applications. However, insufficient consideration of domain knowledge can impose a high risk to the practicality of the methods. Specifically, ignoring the grid-specific spatiotemporal patterns (in load, generation, and topology, etc.) can lead to outputting infeasible, unrealizable, or completely meaningless predictions on new inputs. To address this concern, this paper investigates real-world operational data to provide insights into power grid behavioral patterns, including the time-varying topology, load, and generation, as well as the spatial differences (in peak hours, diverse styles) between individual loads and generations. Then based on these observations, we evaluate the generalization risks in some existing ML works caused by ignoring these grid-specific patterns in model design and training.
@inproceedings{Shimiao2023, author = {Li, Shimiao and Drgoňa, Ján and Abhyankar, Shrirang and Pileggi, Larry}, title = {Power Grid Behavioral Patterns and Risks of Generalization in Applied Machine Learning}, year = {2023}, isbn = {9798400702273}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, url = {https://doi.org/10.1145/3599733.3600257}, doi = {10.1145/3599733.3600257}, booktitle = {Companion Proceedings of the 14th ACM International Conference on Future Energy Systems}, pages = {106–114}, numpages = {9}, keywords = {domain knowledge, power grid, generalization, machine learning}, location = {Orlando, FL, USA}, series = {e-Energy '23 Companion} } -
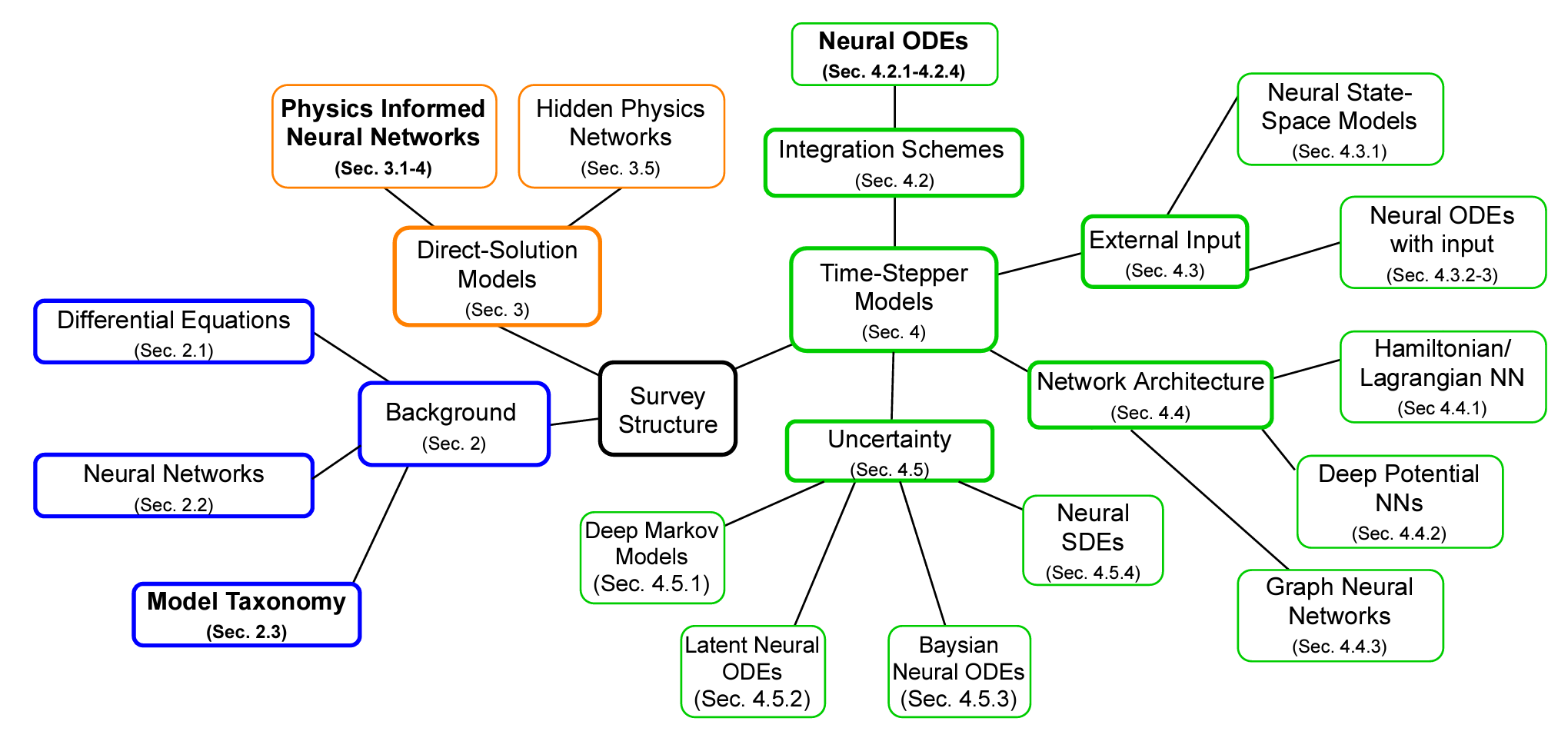 Constructing Neural Network Based Models for Simulating Dynamical SystemsChristian Legaard, Thomas Schranz, Gerald Schweiger, and 6 more authorsACM Computing Surveys, Feb 2023
Constructing Neural Network Based Models for Simulating Dynamical SystemsChristian Legaard, Thomas Schranz, Gerald Schweiger, and 6 more authorsACM Computing Surveys, Feb 2023Dynamical systems see widespread use in natural sciences like physics, biology, and chemistry, as well as engineering disciplines such as circuit analysis, computational fluid dynamics, and control. For simple systems, the differential equations governing the dynamics can be derived by applying fundamental physical laws. However, for more complex systems, this approach becomes exceedingly difficult. Data-driven modeling is an alternative paradigm that seeks to learn an approximation of the dynamics of a system using observations of the true system. In recent years, there has been an increased interest in applying data-driven modeling techniques to solve a wide range of problems in physics and engineering. This article provides a survey of the different ways to construct models of dynamical systems using neural networks. In addition to the basic overview, we review the related literature and outline the most significant challenges from numerical simulations that this modeling paradigm must overcome. Based on the reviewed literature and identified challenges, we provide a discussion on promising research areas.
@article{Legaard2023, author = {Legaard, Christian and Schranz, Thomas and Schweiger, Gerald and Drgo\v{n}a, J\'{a}n and Falay, Basak and Gomes, Cl\'{a}udio and Iosifidis, Alexandros and Abkar, Mahdi and Larsen, Peter}, title = {Constructing Neural Network Based Models for Simulating Dynamical Systems}, year = {2023}, issue_date = {November 2023}, publisher = {Association for Computing Machinery}, address = {New York, NY, USA}, volume = {55}, number = {11}, issn = {0360-0300}, url = {https://doi.org/10.1145/3567591}, doi = {10.1145/3567591}, journal = {ACM Computing Surveys}, month = feb, articleno = {236}, numpages = {34}, keywords = {physics-informed neural networks, physics-based regularization, Neural ODEs} } -
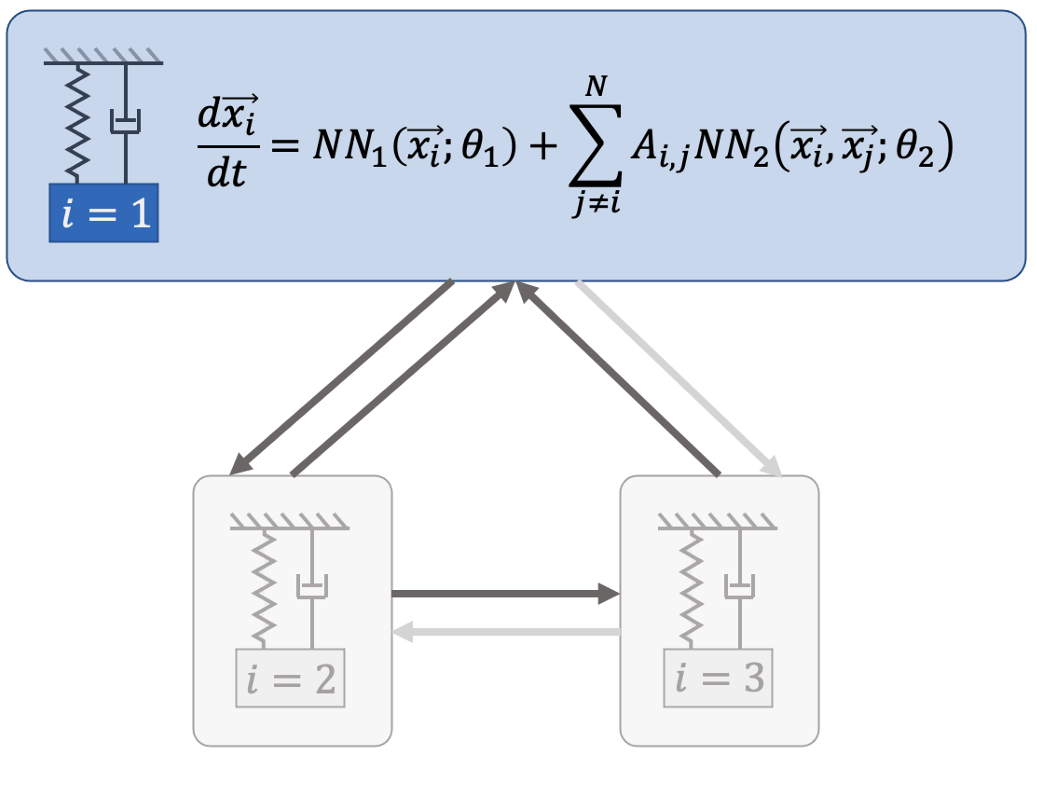 Structural inference of networked dynamical systems with universal differential equationsJ. Koch, Z. Chen, A. Tuor, and 2 more authorsChaos: An Interdisciplinary Journal of Nonlinear Science, Feb 2023
Structural inference of networked dynamical systems with universal differential equationsJ. Koch, Z. Chen, A. Tuor, and 2 more authorsChaos: An Interdisciplinary Journal of Nonlinear Science, Feb 2023Networked dynamical systems are common throughout science in engineering; e.g., biological networks, reaction networks, power systems, and the like. For many such systems, nonlinearity drives populations of identical (or near-identical) units to exhibit a wide range of nontrivial behaviors, such as the emergence of coherent structures (e.g., waves and patterns) or otherwise notable dynamics (e.g., synchrony and chaos). In this work, we seek to infer (i) the intrinsic physics of a base unit of a population, (ii) the underlying graphical structure shared between units, and (iii) the coupling physics of a given networked dynamical system given observations of nodal states. These tasks are formulated around the notion of the Universal Differential Equation, whereby unknown dynamical systems can be approximated with neural networks, mathematical terms known a priori (albeit with unknown parameterizations), or combinations of the two. We demonstrate the value of these inference tasks by investigating not only future state predictions but also the inference of system behavior on varied network topologies. The effectiveness and utility of these methods are shown with their application to canonical networked nonlinear coupled oscillators.
@article{KochChaos2023, author = {Koch, J. and Chen, Z. and Tuor, A. and Drgoňa, Ján and Vrabie, D.}, title = {{Structural inference of networked dynamical systems with universal differential equations}}, journal = {Chaos: An Interdisciplinary Journal of Nonlinear Science}, volume = {33}, number = {2}, pages = {023103}, year = {2023}, month = feb, issn = {1054-1500}, doi = {10.1063/5.0109093}, url = {https://doi.org/10.1063/5.0109093}, eprint = {https://pubs.aip.org/aip/cha/article-pdf/doi/10.1063/5.0109093/16958339/023103\_1\_5.0109093.pdf} } -
 Domain-aware Control-oriented Neural Models for Autonomous Underwater VehiclesWenceslao Shaw Cortez, Soumya Vasisht, Aaron Tuor, and 3 more authorsIFAC-PapersOnLine, Feb 202312th IFAC Symposium on Nonlinear Control Systems NOLCOS 2022
Domain-aware Control-oriented Neural Models for Autonomous Underwater VehiclesWenceslao Shaw Cortez, Soumya Vasisht, Aaron Tuor, and 3 more authorsIFAC-PapersOnLine, Feb 202312th IFAC Symposium on Nonlinear Control Systems NOLCOS 2022Conventional physics-based modeling is a time-consuming bottleneck in control design for complex nonlinear systems like autonomous underwater vehicles (AUVs). In contrast, purely data-driven models require a large number of observations and lack operational guarantees for safety-critical systems. Data-driven models leveraging available partially characterized dynamics have potential to provide reliable systems models in a typical data-limited scenario for high value complex systems, thereby avoiding months of expensive expert modeling time. In this work we explore this middle-ground between expert-modeled and pure data-driven modeling. We present control-oriented parametric models with varying levels of domain-awareness that exploit known system structure and prior physics knowledge to create constrained deep neural dynamical system models. We employ universal differential equations to construct data-driven blackbox and graybox representations of the AUV dynamics. In addition, we explore a hybrid formulation that explicitly models the residual error related to imperfect graybox models. We compare the prediction performance of the learned models for different distributions of initial conditions and control inputs to assess their suitability for control.
@article{CORTEZ2023228, title = {Domain-aware Control-oriented Neural Models for Autonomous Underwater Vehicles}, journal = {IFAC-PapersOnLine}, volume = {56}, number = {1}, pages = {228-233}, year = {2023}, note = {12th IFAC Symposium on Nonlinear Control Systems NOLCOS 2022}, issn = {2405-8963}, doi = {https://doi.org/10.1016/j.ifacol.2023.02.039}, url = {https://www.sciencedirect.com/science/article/pii/S2405896323002276}, author = {Cortez, Wenceslao Shaw and Vasisht, Soumya and Tuor, Aaron and Koch, James and Drgoňa, Ján and Vrabie, Draguna}, keywords = {Deep learning, System identification, Nonlinear predictive control} } -
 Homotopy Learning of Parametric Solutions to Constrained Optimization ProblemsShimiao Li, Ján Drgoňa, Aaron R Tuor, and 2 more authorsFeb 2023
Homotopy Learning of Parametric Solutions to Constrained Optimization ProblemsShimiao Li, Ján Drgoňa, Aaron R Tuor, and 2 more authorsFeb 2023@misc{li2023homotopy, title = {Homotopy Learning of Parametric Solutions to Constrained Optimization Problems}, author = {Li, Shimiao and Drgoňa, Ján and Tuor, Aaron R and Pileggi, Larry and Vrabie, Draguna L}, year = {2023}, url = {https://openreview.net/forum?id=GdimRqV_S7} }






2022
-
 Differentiable Predictive Control with Safety Guarantees: A Control Barrier Function ApproachW. Shaw Cortez, Ján Drgoňa, A. Tuor, and 2 more authorsIn 2022 IEEE 61st Conference on Decision and Control (CDC), Feb 2022
Differentiable Predictive Control with Safety Guarantees: A Control Barrier Function ApproachW. Shaw Cortez, Ján Drgoňa, A. Tuor, and 2 more authorsIn 2022 IEEE 61st Conference on Decision and Control (CDC), Feb 2022@inproceedings{9993146, author = {Cortez, W. Shaw and Drgoňa, Ján and Tuor, A. and Halappanavar, M. and Vrabie, D.}, booktitle = {2022 IEEE 61st Conference on Decision and Control (CDC)}, title = {Differentiable Predictive Control with Safety Guarantees: A Control Barrier Function Approach}, year = {2022}, volume = {}, number = {}, url = {https://ieeexplore.ieee.org/abstract/document/9993146}, pages = {932-938}, doi = {10.1109/CDC51059.2022.9993146} } -
 Neural Lyapunov Differentiable Predictive ControlSayak Mukherjee, Ján Drgoňa, Aaron Tuor, and 2 more authorsIn 2022 IEEE 61st Conference on Decision and Control (CDC), Dec 2022
Neural Lyapunov Differentiable Predictive ControlSayak Mukherjee, Ján Drgoňa, Aaron Tuor, and 2 more authorsIn 2022 IEEE 61st Conference on Decision and Control (CDC), Dec 2022@inproceedings{9992386, author = {Mukherjee, Sayak and Drgoňa, Ján and Tuor, Aaron and Halappanavar, Mahantesh and Vrabie, Draguna}, booktitle = {2022 IEEE 61st Conference on Decision and Control (CDC)}, title = {Neural Lyapunov Differentiable Predictive Control}, year = {2022}, month = dec, volume = {}, number = {}, url = {https://ieeexplore.ieee.org/abstract/document/9992386}, pages = {2097-2104}, doi = {10.1109/CDC51059.2022.9992386} } -
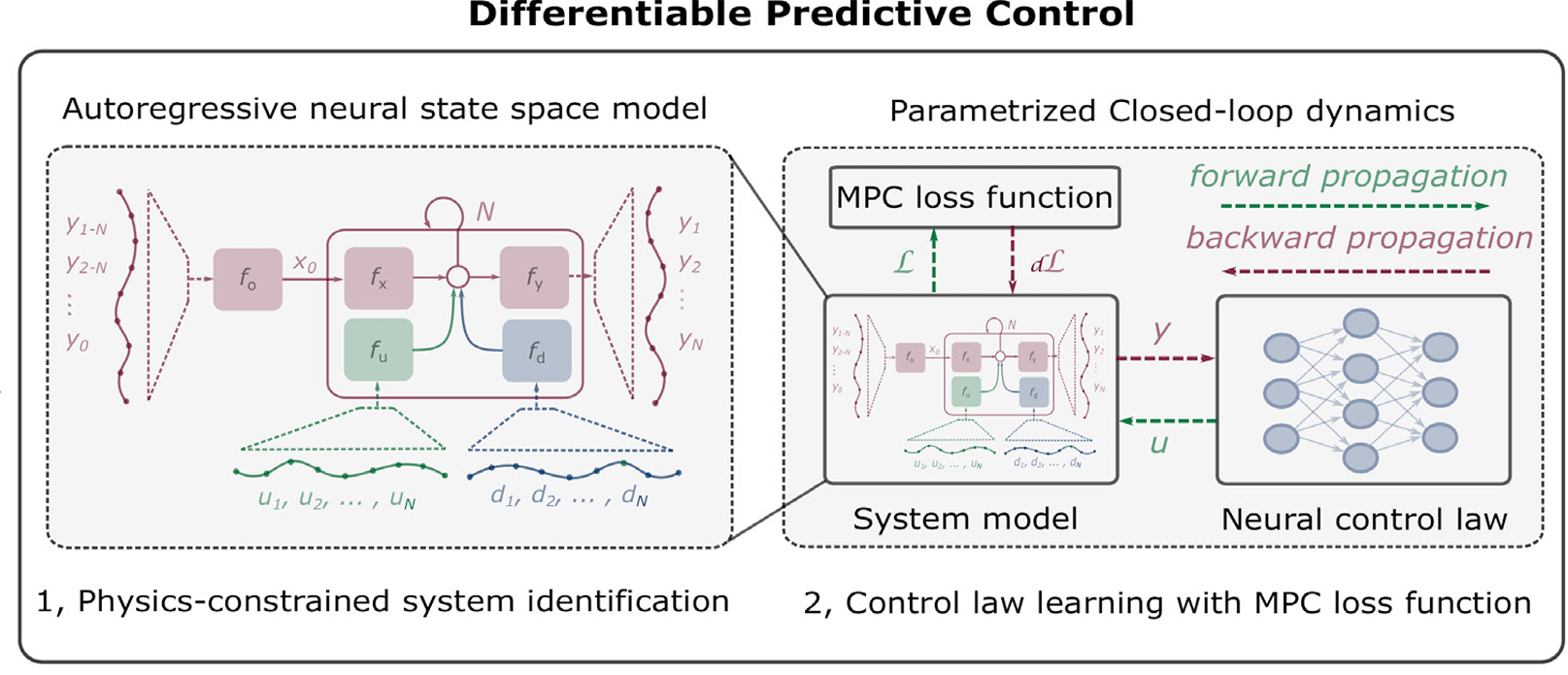
 Differentiable predictive control: Deep learning alternative to explicit model predictive control for unknown nonlinear systemsJán Drgoňa, Karol Kiš, Aaron Tuor, and 2 more authorsJournal of Process Control, Aug 2022
Differentiable predictive control: Deep learning alternative to explicit model predictive control for unknown nonlinear systemsJán Drgoňa, Karol Kiš, Aaron Tuor, and 2 more authorsJournal of Process Control, Aug 2022We present differentiable predictive control (DPC) as a deep learning-based alternative to the explicit model predictive control (MPC) for unknown nonlinear systems. In the DPC framework, a neural state-space model is learned from time-series measurements of the system dynamics. The neural control policy is then optimized via stochastic gradient descent approach by differentiating the MPC loss function through the closed-loop system dynamics model. The proposed DPC method learns model-based control policies with state and input constraints, while supporting time-varying references and constraints. In embedded implementation using a Raspberry-Pi platform, we experimentally demonstrate that it is possible to train constrained control policies purely based on the measurements of the unknown nonlinear system. We compare the control performance of the DPC method against explicit MPC and report efficiency gains in online computational demands, memory requirements, policy complexity, and construction time. In particular, we show that our method scales linearly compared to exponential scalability of the explicit MPC solved via multiparametric programming.
@article{DRGONA202280, title = {Differentiable predictive control: Deep learning alternative to explicit model predictive control for unknown nonlinear systems}, journal = {Journal of Process Control}, volume = {116}, pages = {80-92}, year = {2022}, month = aug, issn = {0959-1524}, doi = {https://doi.org/10.1016/j.jprocont.2022.06.001}, url = {https://www.sciencedirect.com/science/article/pii/S0959152422000981}, author = {Drgoňa, Ján and Kiš, Karol and Tuor, Aaron and Vrabie, Draguna and Klaučo, Martin}, keywords = {Differentiable predictive control, Model predictive control, Neural state space models, Data-driven differentiable optimization, Deep learning} } -
 Data-driven Stabilization of Discrete-time Control-affine Nonlinear Systems: A Koopman Operator ApproachSubhrajit Sinha, Sai Pushpak Nandanoori, Ján Drgona, and 1 more authorIn 2022 European Control Conference (ECC), Aug 2022
Data-driven Stabilization of Discrete-time Control-affine Nonlinear Systems: A Koopman Operator ApproachSubhrajit Sinha, Sai Pushpak Nandanoori, Ján Drgona, and 1 more authorIn 2022 European Control Conference (ECC), Aug 2022@inproceedings{9837986, author = {Sinha, Subhrajit and Nandanoori, Sai Pushpak and Drgona, Ján and Vrabie, Draguna}, booktitle = {2022 European Control Conference (ECC)}, title = {Data-driven Stabilization of Discrete-time Control-affine Nonlinear Systems: A Koopman Operator Approach}, year = {2022}, volume = {}, number = {}, pages = {552-559}, url = {https://ieeexplore.ieee.org/abstract/document/9837986}, doi = {10.23919/ECC55457.2022.9837986} } - A guideline to document occupant behavior models for advanced building controlsBing Dong, Romana Markovic, Salvatore Carlucci, and 20 more authorsBuilding and Environment, Aug 2022
The availability of computational power, and a wealth of data from sensors have boosted the development of model-based predictive control for smart and effective control of advanced buildings in the last decade. More recently occupant-behavior models have been developed for including people in the building control loops. However, while important objectives of scientific research are reproducibility and replicability of results, not all information is available from published documents. Therefore, the aim of this paper is to propose a guideline for a thorough and standardized occupant-behavior model documentation. For that purpose, the literature screening for the existing occupant behavior models in building control was conducted, and the occupant behavior modeling processes were studied to extract practices and gaps for each of the following phases: problem statement, data collection, and preprocessing, model development, model evaluation, and model implementation. The literature screening pointed out that the current state-of-the-art on model documentation shows little unification, which poses a particular burden for the model application and replication in field studies. In addition to the standardized model documentation, this work presented a model-evaluation schema that enabled benchmarking of different models in field settings as well as the recommendations on how OB models are integrated with the building system.
@article{DONG2022109195, title = {A guideline to document occupant behavior models for advanced building controls}, journal = {Building and Environment}, volume = {219}, pages = {109195}, year = {2022}, issn = {0360-1323}, doi = {https://doi.org/10.1016/j.buildenv.2022.109195}, url = {https://www.sciencedirect.com/science/article/pii/S0360132322004310}, author = {Dong, Bing and Markovic, Romana and Carlucci, Salvatore and Liu, Yapan and Wagner, Andreas and Liguori, Antonio and {van Treeck}, Christoph and Oleynikov, Dmitry and Azar, Elie and Fajilla, Gianmarco and Drgoňa, Ján and Kim, Joyce and Vellei, Marika and {De Simone}, Marilena and Shamsaiee, Masood and Bavaresco, Mateus and Favero, Matteo and Kjaergaard, Mikkel and Osman, Mohamed and Frahm, Moritz and Dabirian, Sanam and Yan, Da and Kang, Xuyuan}, keywords = {Guideline documentation, Occupant behavior model, Building control, Model Predictive control (MPC)} } -
 Dissipative Deep Neural Dynamical SystemsJán Drgoňa, Aaron Tuor, Soumya Vasisht, and 1 more authorIEEE Open Journal of Control Systems, Jun 2022
Dissipative Deep Neural Dynamical SystemsJán Drgoňa, Aaron Tuor, Soumya Vasisht, and 1 more authorIEEE Open Journal of Control Systems, Jun 2022@article{9809789, author = {Drgoňa, Ján and Tuor, Aaron and Vasisht, Soumya and Vrabie, Draguna}, journal = {IEEE Open Journal of Control Systems}, title = {Dissipative Deep Neural Dynamical Systems}, year = {2022}, month = jun, volume = {1}, number = {}, pages = {100-112}, url = {https://ieeexplore.ieee.org/abstract/document/9809789}, doi = {10.1109/OJCSYS.2022.3186838} } -
 Koopman-based Differentiable Predictive Control for the Dynamics-Aware Economic Dispatch ProblemEthan King, Ján Drgoňa, Aaron Tuor, and 4 more authorsIn 2022 American Control Conference (ACC), Jun 2022
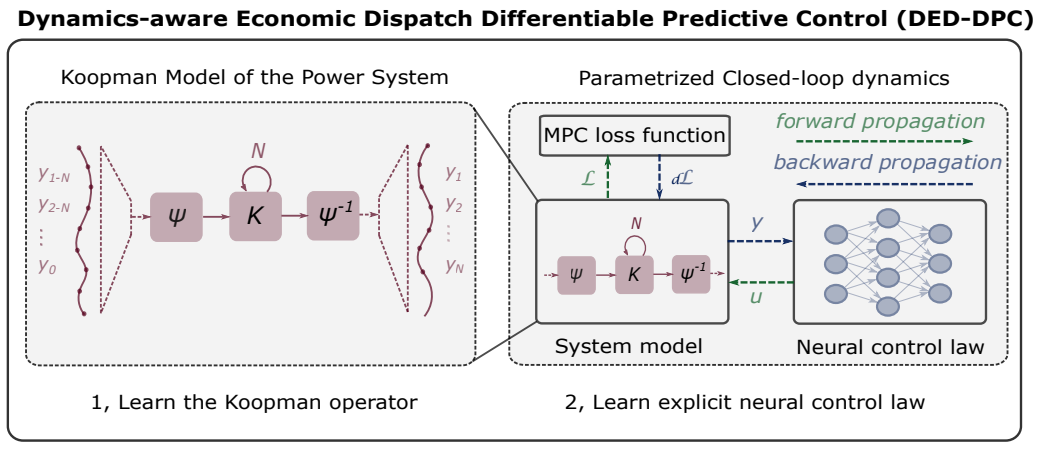
Koopman-based Differentiable Predictive Control for the Dynamics-Aware Economic Dispatch ProblemEthan King, Ján Drgoňa, Aaron Tuor, and 4 more authorsIn 2022 American Control Conference (ACC), Jun 2022@inproceedings{9867379, author = {King, Ethan and Drgoňa, Ján and Tuor, Aaron and Abhyankar, Shrirang and Bakker, Craig and Bhattacharya, Arnab and Vrabie, Draguna}, booktitle = {2022 American Control Conference (ACC)}, title = {Koopman-based Differentiable Predictive Control for the Dynamics-Aware Economic Dispatch Problem}, year = {2022}, volume = {}, number = {}, pages = {2194-2201}, url = {https://ieeexplore.ieee.org/abstract/document/9867379}, doi = {10.23919/ACC53348.2022.9867379} } - ACCNeural Ordinary Differential Equations for Nonlinear System IdentificationAowabin Rahman, Ján Drgoňa, Aaron Tuor, and 1 more authorIn 2022 American Control Conference (ACC), Jun 2022
@inproceedings{9867586, author = {Rahman, Aowabin and Drgoňa, Ján and Tuor, Aaron and Strube, Jan}, booktitle = {2022 American Control Conference (ACC)}, title = {Neural Ordinary Differential Equations for Nonlinear System Identification}, year = {2022}, volume = {}, number = {}, pages = {3979-3984}, url = {https://ieeexplore.ieee.org/abstract/document/9867586}, doi = {10.23919/ACC53348.2022.9867586} } -
 Learning Stochastic Parametric Diferentiable Predictive Control PoliciesJán Drgoňa, Sayak Mukherjee, Aaron Tuor, and 2 more authorsIFAC-PapersOnLine, Jun 202210th IFAC Symposium on Robust Control Design ROCOND 2022
Learning Stochastic Parametric Diferentiable Predictive Control PoliciesJán Drgoňa, Sayak Mukherjee, Aaron Tuor, and 2 more authorsIFAC-PapersOnLine, Jun 202210th IFAC Symposium on Robust Control Design ROCOND 2022The problem of synthesizing stochastic explicit model predictive control policies is known to be quickly intractable even for systems of modest complexity when using classical control-theoretic methods. To address this challenge, we present a scalable alternative called stochastic parametric differentiable predictive control (SP-DPC) for unsupervised learning of neural control policies governing stochastic linear systems subject to nonlinear chance constraints. SP-DPC is formulated as a deterministic approximation to the stochastic parametric constrained optimal control problem. This formulation allows us to directly compute the policy gradients via automatic differentiation of the problem’s value function, evaluated over sampled parameters and uncertainties. In particular, the computed expectation of the SP-DPC problem’s value function is back propagated through the closed-loop system rollouts parametrized by a known nominal system dynamics model and neural control policy which allows for direct model-based policy optimization. We demonstrate the computational efficiency and scalability of the proposed policy optimization algorithm in three numerical examples, including systems with a large number of states or subject to nonlinear constraints.
@article{DRGONA2022121, title = {Learning Stochastic Parametric Diferentiable Predictive Control Policies}, journal = {IFAC-PapersOnLine}, volume = {55}, number = {25}, pages = {121-126}, year = {2022}, note = {10th IFAC Symposium on Robust Control Design ROCOND 2022}, issn = {2405-8963}, doi = {https://doi.org/10.1016/j.ifacol.2022.09.334}, url = {https://www.sciencedirect.com/science/article/pii/S2405896322015877}, author = {Drgoňa, Ján and Mukherjee, Sayak and Tuor, Aaron and Halappanavar, Mahantesh and Vrabie, Draguna}, keywords = {Stochastic explicit model predictive control, offline model-based policy optimization, deep neural networks, differentiable programming, parametric programming} } -
 Learning Constrained Adaptive Differentiable Predictive Control Policies With GuaranteesJán Drgoňa, Aaron Tuor, and Draguna VrabieJun 2022
Learning Constrained Adaptive Differentiable Predictive Control Policies With GuaranteesJán Drgoňa, Aaron Tuor, and Draguna VrabieJun 2022@misc{drgona2022learning, title = {Learning Constrained Adaptive Differentiable Predictive Control Policies With Guarantees}, author = {Drgoňa, Ján and Tuor, Aaron and Vrabie, Draguna}, year = {2022}, eprint = {2004.11184}, archiveprefix = {arXiv}, primaryclass = {eess.SY} }








2021
-
 On the Stochastic Stability of Deep Markov ModelsJán Drgoňa, Sayak Mukherjee, Jiaxin Zhang, and 2 more authorsIn Advances in Neural Information Processing Systems, Jun 2021
On the Stochastic Stability of Deep Markov ModelsJán Drgoňa, Sayak Mukherjee, Jiaxin Zhang, and 2 more authorsIn Advances in Neural Information Processing Systems, Jun 2021@inproceedings{NEURIPS2021_c9dd73f5, author = {Drgoňa, Ján and Mukherjee, Sayak and Zhang, Jiaxin and Liu, Frank and Halappanavar, Mahantesh}, booktitle = {Advances in Neural Information Processing Systems}, editor = {Ranzato, M. and Beygelzimer, A. and Dauphin, Y. and Liang, P.S. and Vaughan, J. Wortman}, pages = {24033--24047}, publisher = {Curran Associates, Inc.}, title = {On the Stochastic Stability of Deep Markov Models}, url = {https://proceedings.neurips.cc/paper/2021/hash/c9dd73f5cb96486f5e1e0680e841a550-Abstract.html}, volume = {34}, year = {2021} } -
 Building optimization testing framework (BOPTEST) for simulation-based benchmarking of control strategies in buildingsJournal of Building Performance Simulation, Jun 2021
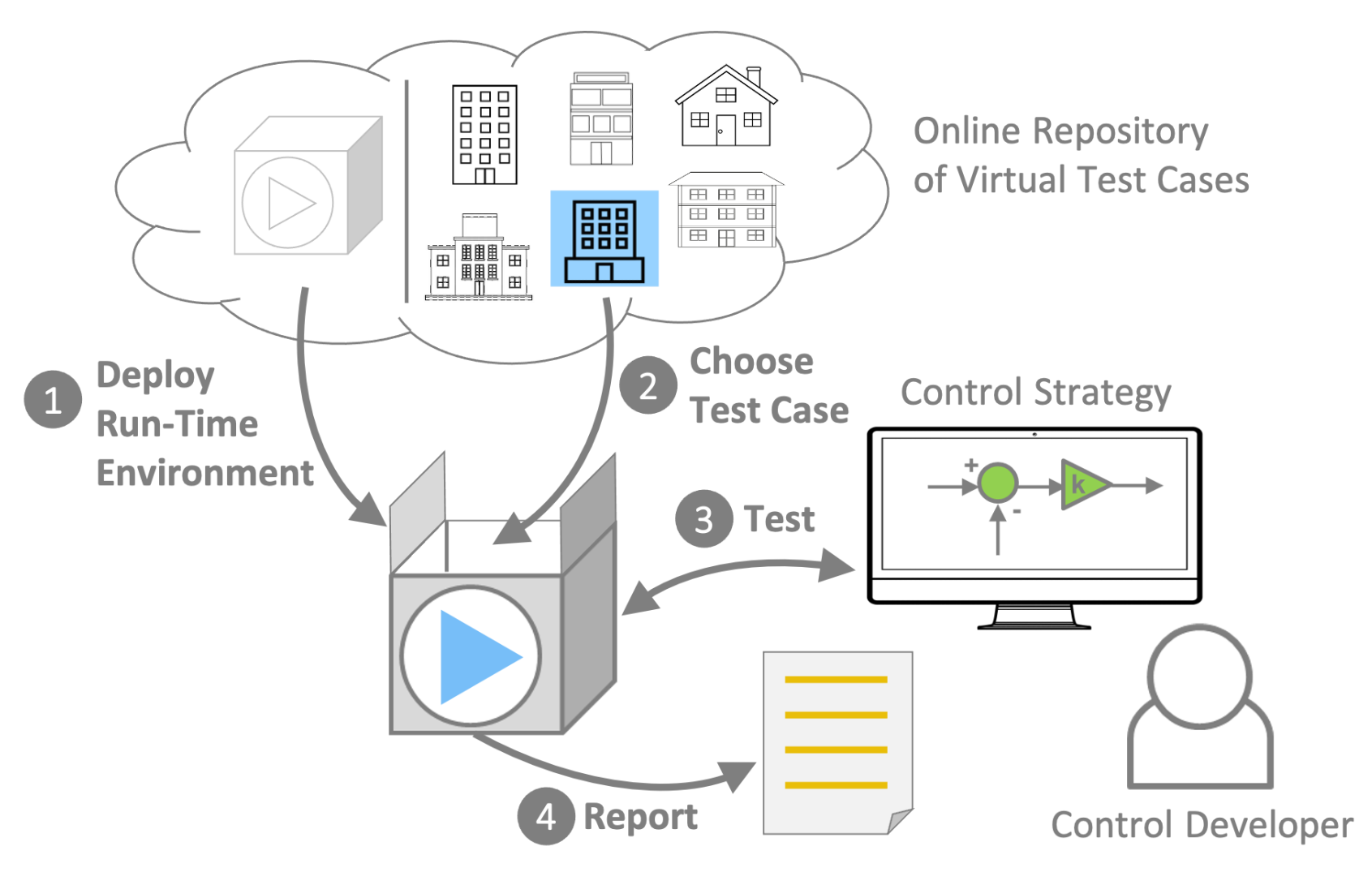
Building optimization testing framework (BOPTEST) for simulation-based benchmarking of control strategies in buildingsJournal of Building Performance Simulation, Jun 2021@article{Blum2021, author = {}, title = {Building optimization testing framework (BOPTEST) for simulation-based benchmarking of control strategies in buildings}, journal = {Journal of Building Performance Simulation}, volume = {14}, number = {5}, pages = {586-610}, year = {2021}, publisher = {Taylor & Francis}, doi = {10.1080/19401493.2021.1986574}, url = {https://doi.org/10.1080/19401493.2021.1986574}, eprint = {https://doi.org/10.1080/19401493.2021.1986574} } - BSEnergy prediction under changed demand conditions: robust machine learning models and input feature combinationsThomas Schranz, Johannes Exenberger, Christian Møldrup Legaard, and 2 more authorsIn Proceedings of Building Simulation 2021: 17th Conference of IBPSA, Sep 2021
Deciding on a suitable algorithm for energy demand prediction in a building is non-trivial and depends on the availability of data. In this paper we compare four machine learning models, commonly found in the literature, in terms of their generalization performance and in terms of how using different sets of input features affects accuracy. This is tested on a data set where consumption patterns differ significantly between training and evaluation because of the Covid-19 pandemic. We provide a hands-on guide and supply a Python framework for building operators to adapt and use in their applications.
@inproceedings{bs2021_30806, doi = {https://doi.org/10.26868/25222708.2021.30806}, url = {https://publications.ibpsa.org/conference/paper/?id=bs2021_30806}, year = {2021}, month = sep, publisher = {IBPSA}, author = {Schranz, Thomas and Exenberger, Johannes and Legaard, Christian Møldrup and Drgona, Ján and Schweiger, Gerald}, title = {Energy prediction under changed demand conditions: robust machine learning models and input feature combinations}, booktitle = {Proceedings of Building Simulation 2021: 17th Conference of IBPSA}, volume = {17}, isbn = {978-1-7750520-2-9}, address = {Bruges, Belgium}, series = {Building Simulation}, pages = {3268--3275}, issn = {2522-2708}, organisation = {IBPSA}, editors = {} } -
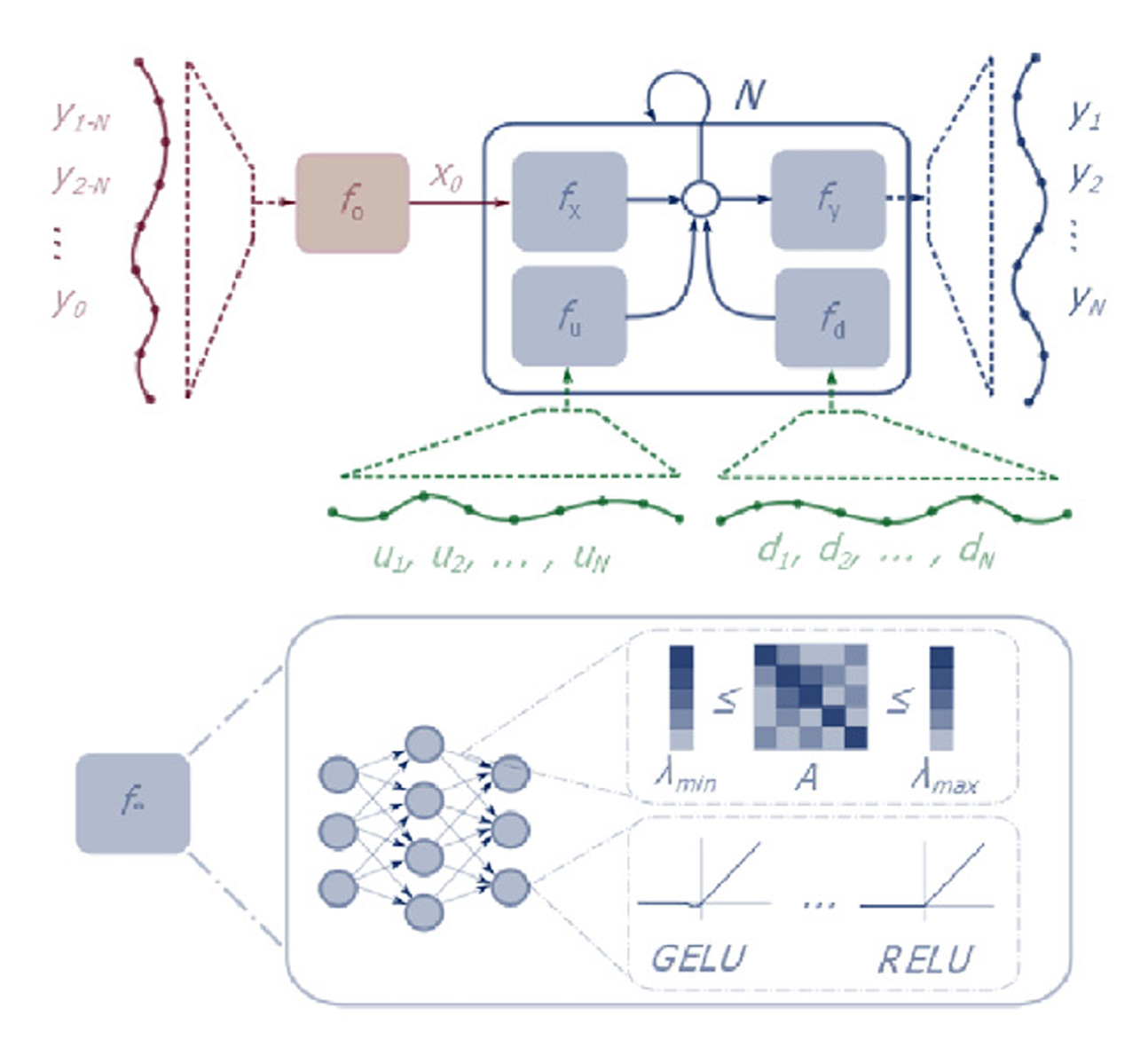 Physics-constrained deep learning of multi-zone building thermal dynamicsJán Drgoňa, Aaron R. Tuor, Vikas Chandan, and 1 more authorEnergy and Buildings, Sep 2021
Physics-constrained deep learning of multi-zone building thermal dynamicsJán Drgoňa, Aaron R. Tuor, Vikas Chandan, and 1 more authorEnergy and Buildings, Sep 2021We present a physics-constrained deep learning method to develop control-oriented models of building thermal dynamics. The proposed method uses systematic encoding of physics-based prior knowledge into a structured recurrent neural architecture. Specifically, our method incorporates structural prior knowledge from traditional physics-based building modeling into the architecture of the deep neural network model. Further, we also use penalty methods to provide inequality constraints, thereby bounding predictions within physically realistic and safe operating ranges. We observe that stable eigenvalues accurately characterize the dissipativeness of the system, and use a constrained matrix parameterization based on the Perron-Frobenius theorem to bound the dominant eigenvalues of the building thermal model parameter matrices. We demonstrate the effectiveness and physical interpretability of the proposed data-driven modeling approach on a real-world dataset obtained from an office building with 20 thermal zones. The proposed data-driven method can learn interpretable dynamical models that achieve high accuracy and generalization over long-term prediction horizons. We show that using only 10 days’ measurements for training, our method is capable of generalizing over 20 consecutive days. We demonstrate that the proposed modeling methodology is achieving state-of-the-art performance by significantly improving the accuracy and generalization compared to classical system identification methods and prior advanced methods reported in the literature. compared to prior state-of-the-art methods reported in the literature.
@article{DRGONA2021110992, title = {Physics-constrained deep learning of multi-zone building thermal dynamics}, journal = {Energy and Buildings}, volume = {243}, pages = {110992}, year = {2021}, issn = {0378-7788}, doi = {https://doi.org/10.1016/j.enbuild.2021.110992}, url = {https://www.sciencedirect.com/science/article/pii/S0378778821002760}, author = {Drgoňa, Ján and Tuor, Aaron R. and Chandan, Vikas and Vrabie, Draguna L.}, keywords = {System identification, Physics-constrained deep learning, Building thermal dynamics, Control-oriented modeling} } - L4DCAutomating Discovery of Physics-Informed Neural State Space Models via Learning and EvolutionElliott Skomski, Ján Drgoňa, and Aaron TuorIn Proceedings of the 3rd Conference on Learning for Dynamics and Control, 07 – 08 june 2021
@inproceedings{skomski21a, title = {Automating Discovery of Physics-Informed Neural State Space Models via Learning and Evolution}, author = {Skomski, Elliott and Drgo\v{n}a, J\'an and Tuor, Aaron}, booktitle = {Proceedings of the 3rd Conference on Learning for Dynamics and Control}, pages = {980--991}, year = {2021}, editor = {Jadbabaie, Ali and Lygeros, John and Pappas, George J. and A. Parrilo, Pablo and Recht, Benjamin and Tomlin, Claire J. and Zeilinger, Melanie N.}, volume = {144}, series = {Proceedings of Machine Learning Research}, month = {07 -- 08 June}, publisher = {PMLR}, url = {https://proceedings.mlr.press/v144/skomski21a.html}, abs = {Recent works exploring deep learning application to dynamical systems modeling have demonstrated that embedding physical priors into neural networks can yield more effective, physically-realistic, and data-efficient models. However, in the absence of complete prior knowledge of a dynamical system’s physical characteristics, determining the optimal structure and optimization strategy for these models can be difficult. In this work, we explore methods for discovering neural state space dynamics models for system identification. Starting with a design space of block-oriented state space models and structured linear maps with strong physical priors, we encode these components into a model genome alongside network structure, penalty constraints, and optimization hyperparameters. Demonstrating the overall utility of the design space, we employ an asynchronous genetic search algorithm that alternates between model selection and optimization and obtains accurate physically consistent models of three physical systems: an aerodynamics body, a continuous stirred tank reactor, and a two tank interacting system.} } -
 Constrained Block Nonlinear Neural Dynamical ModelsElliott Skomski, Soumya Vasisht, Colby Wight, and 3 more authorsIn 2021 American Control Conference (ACC), 07 – 08 june 2021
Constrained Block Nonlinear Neural Dynamical ModelsElliott Skomski, Soumya Vasisht, Colby Wight, and 3 more authorsIn 2021 American Control Conference (ACC), 07 – 08 june 2021@inproceedings{SkomskiACC2021, author = {Skomski, Elliott and Vasisht, Soumya and Wight, Colby and Tuor, Aaron and Drgoňa, Ján and Vrabie, Draguna}, booktitle = {2021 American Control Conference (ACC)}, title = {Constrained Block Nonlinear Neural Dynamical Models}, year = {2021}, volume = {}, number = {}, pages = {3993-4000}, url = {https://ieeexplore.ieee.org/abstract/document/9482930}, doi = {10.23919/ACC50511.2021.9482930} } -
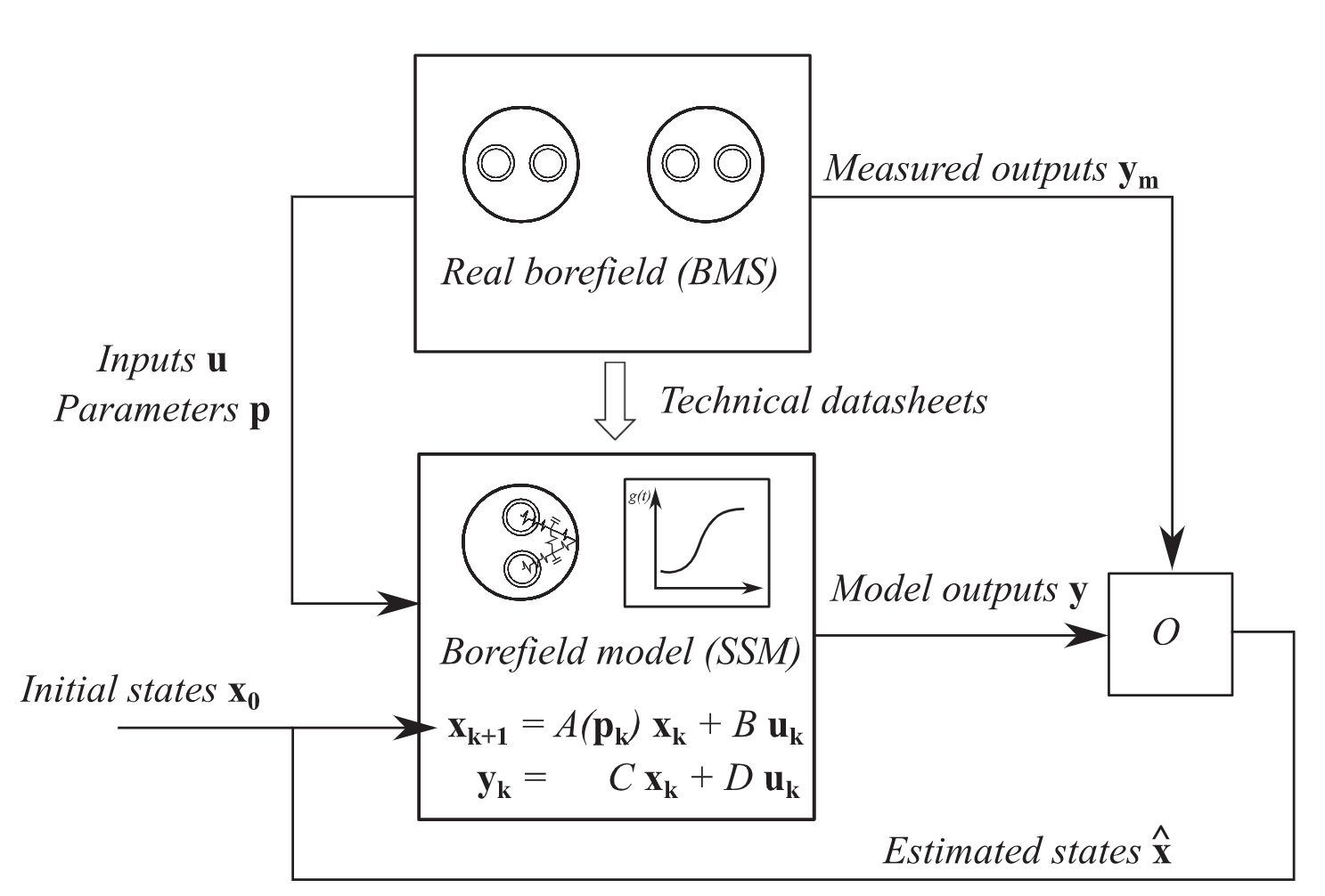 Fluid temperature predictions of geothermal borefields using load estimations via state observersJán Drgoňa Iago Cupeiro Figueroa, and Lieve HelsenJournal of Building Performance Simulation, 07 – 08 june 2021
Fluid temperature predictions of geothermal borefields using load estimations via state observersJán Drgoňa Iago Cupeiro Figueroa, and Lieve HelsenJournal of Building Performance Simulation, 07 – 08 june 2021@article{Figueroa2021, author = {Iago Cupeiro Figueroa, Massimo Cimmino, Ján Drgoňa and Helsen, Lieve}, title = {Fluid temperature predictions of geothermal borefields using load estimations via state observers}, journal = {Journal of Building Performance Simulation}, volume = {14}, number = {1}, pages = {1-19}, year = {2021}, publisher = {Taylor & Francis}, doi = {10.1080/19401493.2020.1838612}, url = {https://doi.org/10.1080/19401493.2020.1838612}, eprint = {https://doi.org/10.1080/19401493.2020.1838612} } -
 Deep Learning Explicit Differentiable Predictive Control Laws for BuildingsJán Drgoňa, Aaron Tuor, Elliott Skomski, and 2 more authorsIFAC-PapersOnLine, 07 – 08 june 20217th IFAC Conference on Nonlinear Model Predictive Control NMPC 2021
Deep Learning Explicit Differentiable Predictive Control Laws for BuildingsJán Drgoňa, Aaron Tuor, Elliott Skomski, and 2 more authorsIFAC-PapersOnLine, 07 – 08 june 20217th IFAC Conference on Nonlinear Model Predictive Control NMPC 2021@article{DRGONA202114, title = {Deep Learning Explicit Differentiable Predictive Control Laws for Buildings}, journal = {IFAC-PapersOnLine}, volume = {54}, number = {6}, pages = {14-19}, year = {2021}, note = {7th IFAC Conference on Nonlinear Model Predictive Control NMPC 2021}, issn = {2405-8963}, doi = {https://doi.org/10.1016/j.ifacol.2021.08.518}, url = {https://www.sciencedirect.com/science/article/pii/S2405896321012933}, author = {Drgoňa, Ján and Tuor, Aaron and Skomski, Elliott and Vasisht, Soumya and Vrabie, Draguna}, keywords = {constrained deep learning, neural state space models, system identification, differentiable predictive control, explicit nonlinear MPC}, abs = {We present a differentiable predictive control (DPC) methodology for learning constrained control laws for unknown nonlinear systems. DPC poses an approximate solution to multiparametric programming problems emerging from explicit nonlinear model predictive control (MPC). Contrary to approximate MPC, DPC does not require supervision by an expert controller. Instead, a system dynamics model is learned from the observed system’s dynamics, and the neural control law is optimized offline by leveraging the differentiable closed-loop system model. The combination of a differentiable closed-loop system and penalty methods for constraint handling of system outputs and inputs allows us to optimize the control law’s parameters directly by backpropagating economic MPC loss through the learned system model. The control performance of the proposed DPC method is demonstrated in simulation using learned model of multi-zone building thermal dynamics.} }






2020
-
 Cutting the Deployment Costs of Physics-Based MPC in Buildings by Simulation-Based Imitation LearningJán Drgona, Lieve Helsen, and Draguna L. VrabieOct 2020
Cutting the Deployment Costs of Physics-Based MPC in Buildings by Simulation-Based Imitation LearningJán Drgona, Lieve Helsen, and Draguna L. VrabieOct 2020@proceedings{DrgonaDSCC2020, author = {Drgona, Ján and Helsen, Lieve and Vrabie, Draguna L.}, title = {{Cutting the Deployment Costs of Physics-Based MPC in Buildings by Simulation-Based Imitation Learning}}, volume = {Volume 1: Adaptive/Intelligent Sys. Control; Driver Assistance/Autonomous Tech.; Control Design Methods; Nonlinear Control; Robotics; Assistive/Rehabilitation Devices; Biomedical/Neural Systems; Building Energy Systems; Connected Vehicle Systems; Control/Estimation of Energy Systems; Control Apps.; Smart Buildings/Microgrids; Education; Human-Robot Systems; Soft Mechatronics/Robotic Components/Systems; Energy/Power Systems; Energy Storage; Estimation/Identification; Vehicle Efficiency/Emissions}, series = {Dynamic Systems and Control Conference}, pages = {V001T09A001}, year = {2020}, month = oct, abs = {{It has been shown that model predictive control (MPC) is a promising solution for energy-efficient building operations. However, the deployment of MPC in a large portion of the building stock has not been possible partially because of high installation costs. Every building is unique and requires a tailored MPC solution. The best performing solutions are often based on physics-based modeling, which is, however, computationally expensive and requires dedicated software. A promising direction that tackles this problem is to train a neural network-based optimal control policy to imitate the behavior of physics-based MPC from the simulation data generated offline. The neural networks give control actions that closely approximate those produced by physics-based MPC, but with a fraction of the computational and memory requirements and without the need for licensed software. The main advantage of the proposed approach stems from simple evaluation at execution time, leading to low computational foot-prints and easy deployment on embedded HW platforms. In the case study, we present the energy savings potential of physics-based MPC applied to an office building in Belgium. We demonstrate how neural network approximators can be used to cut the implementation and maintenance costs of MPC deployment without compromising performance. We also critically assess the presented approach by pointing out the remaining challenges and open research questions.}}, doi = {10.1115/DSCC2020-3118}, url = {https://doi.org/10.1115/DSCC2020-3118}, eprint = {https://asmedigitalcollection.asme.org/DSCC/proceedings-pdf/DSCC2020/84270/V001T09A001/6622197/v001t09a001-dscc2020-3118.pdf} } - ICLRConstrained Neural Ordinary Differential Equations with Stability GuaranteesAaron Tuor, Ján Drgoňa, and Draguna VrabieOct 2020
@misc{tuor2020constrained, title = {Constrained Neural Ordinary Differential Equations with Stability Guarantees}, author = {Tuor, Aaron and Drgoňa, Ján and Vrabie, Draguna}, year = {2020}, eprint = {2004.10883}, archiveprefix = {arXiv}, url = {https://arxiv.org/abs/2004.10883}, primaryclass = {eess.SY} } -
 Cloud-based implementation of white-box model predictive control for a GEOTABS office building: A field test demonstrationJán Drgoňa, Damien Picard, and Lieve HelsenJournal of Process Control, Oct 2020
Cloud-based implementation of white-box model predictive control for a GEOTABS office building: A field test demonstrationJán Drgoňa, Damien Picard, and Lieve HelsenJournal of Process Control, Oct 2020@article{DRGONA202063, title = {Cloud-based implementation of white-box model predictive control for a GEOTABS office building: A field test demonstration}, journal = {Journal of Process Control}, volume = {88}, pages = {63-77}, year = {2020}, issn = {0959-1524}, doi = {https://doi.org/10.1016/j.jprocont.2020.02.007}, url = {https://www.sciencedirect.com/science/article/pii/S0959152419306857}, author = {Drgoňa, Ján and Picard, Damien and Helsen, Lieve}, keywords = {Model predictive control, Building climate control, White-box modeling, Cloud-based implementation, Field test}, abs = {Model predictive control (MPC) has been proven in simulations and pilot case studies to be a superior control strategy for large buildings. MPC can utilize the weather and occupancy schedule forecasts, together with the system model, to predict the future thermal behavior of the building and minimize the overall energy use and maximize thermal comfort. However, these advantages come with the cost of increased modeling effort, computational demands, communication infrastructure, and commissioning efforts. Thus a typical approach is to, often rapidly, simplify the building modeling and MPC optimization problem while paying a price of not reaching the full performance potential. It has been shown that by employing accurate physics-based models, MPC performance can be notably increased closer to its theoretical performance bound. However, implementation of such high-fidelity MPC in real buildings remains a challenge, resulting in a lack of successful field test studies. This work presents the methodology and field test demonstration of a computationally efficient implementation of the white-box MPC in an office building in Belgium. The detailed model of the building is based on first-principle physical equations. The deployment and supervision of MPC operation in a practical setting are supported by an automated cloud-based communication infrastructure. The motivating factor behind the cloud-based architecture is its compatibility with a commercially appealing control as a service concept. The building is equipped with a ground source heat pump (GSHP) and thermally activated building structures (TABS), where the combination of both is also known as GEOTABS. From a control perspective, GEOTABS buildings are particularly challenging systems due to large scale, complex heating, ventilation and air conditioning (HVAC) system, and slow dynamics with time delays. On the other hand, there is an increased potential for energy savings due to the high thermal mass, which acts as thermal storage. The MPC operation is demonstrated during the challenging transient seasons (switching between heating and cooling), and its performance is compared to a traditional rule-based controller (RBC). We provide a proof of concept of real MPC operation for the most difficult seasons with notable GSHP energy use savings equal to 53.5% and thermal comfort improvement by 36.9%. Other MPC applications found in the literature describe tests for only cooling or only heating, and up to now only for a black-box or a grey-box approach.} } -
 All you need to know about model predictive control for buildingsJán Drgoňa, Javier Arroyo, Iago Cupeiro Figueroa, and 8 more authorsAnnual Reviews in Control, Sep 2020
All you need to know about model predictive control for buildingsJán Drgoňa, Javier Arroyo, Iago Cupeiro Figueroa, and 8 more authorsAnnual Reviews in Control, Sep 2020@article{DRGONA2020190, title = {All you need to know about model predictive control for buildings}, journal = {Annual Reviews in Control}, volume = {50}, month = sep, pages = {190-232}, year = {2020}, issn = {1367-5788}, doi = {https://doi.org/10.1016/j.arcontrol.2020.09.001}, url = {https://www.sciencedirect.com/science/article/pii/S1367578820300584}, author = {Drgoňa, Ján and Arroyo, Javier and {Cupeiro Figueroa}, Iago and Blum, David and Arendt, Krzysztof and Kim, Donghun and Ollé, Enric Perarnau and Oravec, Juraj and Wetter, Michael and Vrabie, Draguna L. and Helsen, Lieve}, keywords = {Model predictive control, Building climate control, MPC formulation, MPC software tools, MPC implementation}, abs = {It has been proven that advanced building control, like model predictive control (MPC), can notably reduce the energy use and mitigate greenhouse gas emissions. However, despite intensive research efforts, the practical applications are still in the early stages. There is a growing need for multidisciplinary education on advanced control methods in the built environment to be accessible for a broad range of researchers and practitioners with different engineering backgrounds. This paper provides a unified framework for model predictive building control technology with focus on the real-world applications. From a theoretical point of view, this paper presents an overview of MPC formulations for building control, modeling paradigms and model types, together with algorithms necessary for real-life implementation. The paper categorizes the most notable MPC problem classes, links them with corresponding solution techniques, and provides an overview of methods for mitigation of the uncertainties for increased performance and robustness of MPC. From a practical point of view, this paper delivers an elaborate classification of the most important modeling, co-simulation, optimal control design, and optimization techniques, tools, and solvers suitable to tackle the MPC problems in the context of building climate control. On top of this, the paper presents the essential components of a practical implementation of MPC such as different control architectures and nuances of communication infrastructures within supervisory control and data acquisition (SCADA) systems. The paper draws practical guidelines with a generic workflow for implementation of MPC in real buildings aimed for contemporary adopters of this technology. Finally, the importance of standardized performance assessment and methodology for comparison of different building control algorithms is discussed.} }



2019
- BSState Estimators Applied To A White-box Geothermal Borefield Controller ModelIago Cupeiro Figueroa, Ján Drgo?a, and Lieve HelsenIn Proceedings of Building Simulation 2019: 16th Conference of IBPSA, Sep 2019
@inproceedings{bs2019_210226, doi = {https://doi.org/10.26868/25222708.2019.210226}, url = {https://publications.ibpsa.org/conference/paper/?id=bs2019_210226}, year = {2019}, month = sep, publisher = {IBPSA}, author = {Figueroa, Iago Cupeiro and Drgo?a, Ján and Helsen, Lieve}, title = {State Estimators Applied To A White-box Geothermal Borefield Controller Model}, booktitle = {Proceedings of Building Simulation 2019: 16th Conference of IBPSA}, volume = {16}, isbn = {978-1-7750520-1-2}, address = {Rome, Italy}, series = {Building Simulation}, pages = {830--837}, abs = {Modelling of geothermal borefields for building energy simulations (BES) has always been a complicated task due to the challenge of implementing both their short-term and long-term responses. Besides, in model-based optimal control of geothermal systems, a simplified version of a borefield control-oriented model is desired. Typical prediction horizons used in optimal control of buildings range from hours to a few days, inviting to reduce the complexity of the controller model down to the short-term range. However, the long-term thermal behaviour of the ground is crucial with respect to the heat pump COP and availability of direct cooling. In a white-box controller model, the states keep their physical meaning. Thus, the longterm dynamics can be captured from the model used for dynamic simulation, i.e. the emulator, and updated to the controller model at each optimisation time-step. Nevertheless, since in a real implementation the availability of data is much more limited a state estimator is necessary. In this paper, three state estimators (Stationary Kalman Filter, Time-Varying Kalman Filter and Moving Horizon Estimator) for a linear borehole model are compared using real data from a building combining a geothermal heat pump and a thermally activated building system (hybridGEOTABS). In general, all investigated linear estimators are capable of accurately estimating the ground states.}, issn = {2522-2708}, organisation = {IBPSA}, editors = {V. Corrado, E. Fabrizio, A. Gasparella, and F. Patuzzi} } - NeurIPSStripping off the implementation complexity of physics-based model predictive control for buildings via deep learningJán Drgona, Lieve Helsen, and Draguna VrabieIn NeurIPS 2019 Workshop on Tackling Climate Change with Machine Learning, Sep 2019
@inproceedings{drgona2019stripping, title = {Stripping off the implementation complexity of physics-based model predictive control for buildings via deep learning}, author = {Drgona, Ján and Helsen, Lieve and Vrabie, Draguna}, booktitle = {NeurIPS 2019 Workshop on Tackling Climate Change with Machine Learning}, url = {https://www.climatechange.ai/papers/neurips2019/34}, year = {2019} }
2018
- Approximate model predictive building control via machine learningJán Drgoňa, Damien Picard, Michal Kvasnica, and 1 more authorApplied Energy, Sep 2018
@article{DRGONA2018199, title = {Approximate model predictive building control via machine learning}, journal = {Applied Energy}, volume = {218}, pages = {199-216}, year = {2018}, issn = {0306-2619}, doi = {https://doi.org/10.1016/j.apenergy.2018.02.156}, url = {https://www.sciencedirect.com/science/article/pii/S0306261918302903}, author = {Drgoňa, Ján and Picard, Damien and Kvasnica, Michal and Helsen, Lieve}, keywords = {Building climate control, Model predictive control, Machine learning, Dimensionality reduction, Time delay neural networks, Regression trees}, abs = {Many studies have proven that the building sector can significantly benefit from replacing the current practice rule-based controllers (RBC) by more advanced control strategies like model predictive control (MPC). However, the optimization-based control algorithms, like MPC, impose increasing hardware and software requirements, together with more complicated error handling capabilities required from the commissioning staff. In recent years, several studies introduced promising remedy for these problems by using machine learning algorithms. The idea is based on devising simplified control laws learned from MPC. The main advantage of the proposed methods stems from their easy implementation even on low-level hardware. However, most of the reported studies were dealing only with problems with a limited complexity of the parametric space, and devising laws only for a single control variable, which inevitably limits their applicability to more complex building control problems. In this paper, we introduce a versatile framework for synthesis of simple, yet well-performing control strategies that mimic the behavior of optimization-based controllers, also for large scale multiple-input-multiple-output (MIMO) control problems which are common in the building sector. The approach employs multivariate regression and dimensionality reduction algorithms. Particularly, deep time delay neural networks (TDNN) and regression trees (RT) are used to derive the dependency of multiple real-valued control inputs on parameters. The complexity of the problem, as well as implementation cost, are further reduced by selecting the most significant features from the set of parameters. This reduction is based on straightforward manual selection, principal component analysis (PCA) and dynamic analysis of the building model. The approach is demonstrated on a case study employing temperature control in a six-zone building, described by a linear model with 286 states and 42 disturbances, resulting in an MPC problem with more than thousand of parameters. The results show that simplified control laws retain most of the performance of the complex MPC, while significantly decreasing the complexity and implementation cost.} } - MPC-based reference governor control of a continuous stirred-tank reactorJuraj Holaza, Martin Klaučo, Ján Drgoňa, and 3 more authorsComputers & Chemical Engineering, Sep 2018
@article{HOLAZA2018289, title = {MPC-based reference governor control of a continuous stirred-tank reactor}, journal = {Computers & Chemical Engineering}, volume = {108}, pages = {289-299}, year = {2018}, issn = {0098-1354}, doi = {https://doi.org/10.1016/j.compchemeng.2017.09.020}, url = {https://www.sciencedirect.com/science/article/pii/S0098135417303393}, author = {Holaza, Juraj and Klaučo, Martin and Drgoňa, Ján and Oravec, Juraj and Kvasnica, Michal and Fikar, Miroslav}, keywords = {Model predictive control, Parametric programming, Reference governor, Continuous stirred-tank reactor}, abs = {Optimal control of a CSTR represents a challenging task. The proposed paper discusses two issues. The first one addresses control of pH in a chemical vessel, where the reaction between sodium hydroxide and acetic acid occurs. The objective here is to improve control performance of a well tuned PI controller. It will be shown that this can be achieved by introducing a reference governor scheme. The second problem, elaborated in this paper, is the implementation of the reference governor paradigm. Concretely, we aim to design a fast and cheap MPC-based feedback controller. To achieve these goals, we exploit the region-less explicit technique, which efficiently reduces memory footprint issues of standard explicit MPC schemes. Such MPC-based reference governor was employed to control pH in the chemical vessel. Its control performance is compared with conventional PI controller. Finally, comparison of implementation requirements of region-less and region-based explicit techniques is investigated.} }
2017
- Impact of the controller model complexity on model predictive control performance for buildingsDamien Picard, Ján Drgoňa, Michal Kvasnica, and 1 more authorEnergy and Buildings, Sep 2017
@article{PICARD2017739, title = {Impact of the controller model complexity on model predictive control performance for buildings}, journal = {Energy and Buildings}, volume = {152}, pages = {739-751}, year = {2017}, issn = {0378-7788}, doi = {https://doi.org/10.1016/j.enbuild.2017.07.027}, url = {https://www.sciencedirect.com/science/article/pii/S0378778817302190}, author = {Picard, Damien and Drgoňa, Ján and Kvasnica, Michal and Helsen, Lieve}, keywords = {Building climate control, Optimization, Model predictive control, Model order reduction, Controller model}, abs = {Model predictive control (MPC) for heating, ventilation and air conditioning (HVAC) in buildings requires accurate controller models of the building envelope and its HVAC systems. Controller models are typically obtained by means of black- or grey-box system identification or using a white-box modelling approach. However, the necessary level of model complexity used by each method in order to obtain good MPC performance remains a priori unknown and no systematic method or examples showing the optimal complexity is available. This paper systematically investigates the required controller model complexity necessary to obtain optimal control performance for a given building. First, a 6-room house is modeled in detail using building energy simulation software. The building model is then linearized to obtain a linear time invariant (LTI) state-space model (SSM) and the upper bound of the control performance is computed using an MPC with the SSM both as controller and as plant model. The accuracy of the SSM (containing more than 250 states) is then artificially decreased by reducing its number of states to different orders ranging from 4 to 100 using balanced truncation model order reduction technique. The performances of MPCs using these controller models are then compared with the upper bound for both a standard MPC formulation (S-MPC) and an offset-free formulation (OSF-MPC) and with the performance of a rule-based-controller (RBC). The procedure is repeated for the same house model with a higher level of insulation and for a lighter weight construction. This paper shows that the controller model should contain a minimum of states to model each zone separately, and that the walls and floors separating the zones should also have enough states to act as a low pass filter with correct cut-off frequency. The minimum number of states further increases with the building mass content. In the case of the investigated 6-room house, the thermal comfort achieved by MPC using a controller model with a minimum of 30 states instead of 20 states was improved with a factor 2–6 without significant increase of the energy use, showing that good MPC performances require controller models with a significantly higher number of states than the order used by most of the black- and grey-box system identification techniques. The minimum required number of states might be chosen lower when OSF-MPC is used instead of conventional MPC. However, OSF-MPC might significantly increase the energy use when poor controller models (high model mismatch) are used. Furthermore, if the controller model is an LTI model, this paper shows that the CPU time necessary to solve the MPC optimization problem becomes independent of the number of states of the controller model when a dense approach is used. The controller model can thus be as complex as necessary to produce accurate predictions without increasing the computation time of the optimization.} } - PCModel predictive control of a combined electrolyzer-fuel cell educational pilot plantDeepak Ingole, Ján Drgoňa, Martin Kalúz, and 3 more authorsIn 2017 21st International Conference on Process Control (PC), Sep 2017
@inproceedings{7976205, author = {Ingole, Deepak and Drgoňa, Ján and Kalúz, Martin and Klaučo, Martin and Bakošová, Monika and Kvasnica, Michal}, booktitle = {2017 21st International Conference on Process Control (PC)}, title = {Model predictive control of a combined electrolyzer-fuel cell educational pilot plant}, year = {2017}, volume = {}, number = {}, pages = {149-154}, url = {https://ieeexplore.ieee.org/abstract/document/7976205}, doi = {10.1109/PC.2017.7976205} } - PCOffset-free hybrid model predictive control of bispectral index in anesthesiaDeepak Ingole, Ján Drgoňa, and Michal KvasnicaIn 2017 21st International Conference on Process Control (PC), Sep 2017
@inproceedings{7976251, author = {Ingole, Deepak and Drgoňa, Ján and Kvasnica, Michal}, booktitle = {2017 21st International Conference on Process Control (PC)}, title = {Offset-free hybrid model predictive control of bispectral index in anesthesia}, year = {2017}, volume = {}, number = {}, pages = {422-427}, url = {https://ieeexplore.ieee.org/abstract/document/7976251}, doi = {10.1109/PC.2017.7976251} } - PCFuzzy control of a laboratory binary distillation columnJán Drgoňa, Zdenko Takáč, Milan Horñák, and 2 more authorsIn 2017 21st International Conference on Process Control (PC), Sep 2017
@inproceedings{7976200, author = {Drgoňa, Ján and Takáč, Zdenko and Horñák, Milan and Valo, Richard and Kvasnica, Michal}, booktitle = {2017 21st International Conference on Process Control (PC)}, title = {Fuzzy control of a laboratory binary distillation column}, year = {2017}, volume = {}, number = {}, pages = {120-125}, url = {https://ieeexplore.ieee.org/abstract/document/7976200}, doi = {10.1109/PC.2017.7976200} } - Optimal control of a laboratory binary distillation column via regionless explicit MPCJán Drgoňa, Martin Klaučo, Filip Janeček, and 1 more authorComputers & Chemical Engineering, Sep 2017
@article{DRGONA2017139, title = {Optimal control of a laboratory binary distillation column via regionless explicit MPC}, journal = {Computers & Chemical Engineering}, volume = {96}, pages = {139-148}, year = {2017}, issn = {0098-1354}, doi = {https://doi.org/10.1016/j.compchemeng.2016.10.003}, url = {https://www.sciencedirect.com/science/article/pii/S0098135416303192}, author = {Drgoňa, Ján and Klaučo, Martin and Janeček, Filip and Kvasnica, Michal}, keywords = {Explicit predictive control, Optimization, Process control, Distillation}, abs = {This paper shows how to construct and implement explicit MPC feedback laws for systems with a large number of states. Specifically, the construction of critical regions of the explicit MPC solution is replaced by a two-step procedure. First, all optimal active sets are enumerated off-line and corresponding KKT matrices are pre-factored. Then, in the on-line step, the optimal control inputs are identified by checking primal and dual feasibility conditions using the pre-factored data. The feasibility and performance of the proposed approach are experimentally demonstrated on the control of the laboratory binary distillation column, described by a dynamical model with 10 state variables. We show that the control algorithm requires only modest computational resources on-line. A comparison of the memory and computational demands of the proposed method with the on-line solution of the corresponding quadratic program via the state-of-the-art solver as well as the approximated solution via the first-order method is made.} } - AChSReflux control of a laboratory distillation column via MPC-based reference governorMartin Klaučo, Richard Valo, and Ján DrgoňaActa Chimica Slovaca, Sep 2017
@article{Klauco2017, author = {Klaučo, Martin and Valo, Richard and Drgoňa, Ján}, doi = {doi:10.1515/acs-2017-0023}, url = {https://sciendo.com/it/article/10.1515/acs-2017-0023}, title = {Reflux control of a laboratory distillation column via MPC-based reference governor}, journal = {Acta Chimica Slovaca}, number = {2}, volume = {10}, year = {2017}, pages = {139--143}, }
2016
- ECCRegionless explicit MPC of a distillation columnJán Drgoňa, Filip Janeček, Martin Klaučo, and 1 more authorIn 2016 European Control Conference (ECC), Sep 2016
@inproceedings{7810514, author = {Drgoňa, Ján and Janeček, Filip and Klaučo, Martin and Kvasnica, Michal}, booktitle = {2016 European Control Conference (ECC)}, title = {Regionless explicit MPC of a distillation column}, year = {2016}, volume = {}, number = {}, pages = {1568-1573}, doi = {10.1109/ECC.2016.7810514} } - Teaching Classical and Advanced Control of Binary Distillation ColumnAyush Sharma, Ján Drgoňa, Deepak Ingole, and 4 more authorsIFAC-PapersOnLine, Sep 201611th IFAC Symposium on Advances in Control Education ACE 2016
@article{SHARMA2016348, title = {Teaching Classical and Advanced Control of Binary Distillation Column}, journal = {IFAC-PapersOnLine}, volume = {49}, number = {6}, pages = {348-353}, year = {2016}, note = {11th IFAC Symposium on Advances in Control Education ACE 2016}, issn = {2405-8963}, doi = {https://doi.org/10.1016/j.ifacol.2016.07.202}, url = {https://www.sciencedirect.com/science/article/pii/S2405896316304086}, author = {Sharma, Ayush and Drgoňa, Ján and Ingole, Deepak and Holaza, Juraj and Valo, Richard and Koniar, Simon and Kvasnica, Michal}, keywords = {Laboratory education, distillation column, process control, PID and MPC}, abs = {This paper deals with education of graduate and undergraduate students in the field of classical and advanced controllers. A pilot scale binary distillation column is utilized to serve the teaching purposes. The emphasis of the paper is to practically teach identification, and widely used classical and advanced control schemes, such as Proportional-Integral-Derivative (PID) and Model Predictive Control (MPC), over a plant. MATLAB/Simulink-based Human Machine Interface (HMI) is used by students to implement these control strategies. Performance results of both controllers subject to reference tracking, constraints and disturbance handling are presented. Developed directives and control schemes can be used for effective process control education of chemical/process engineers.} }
2015
-
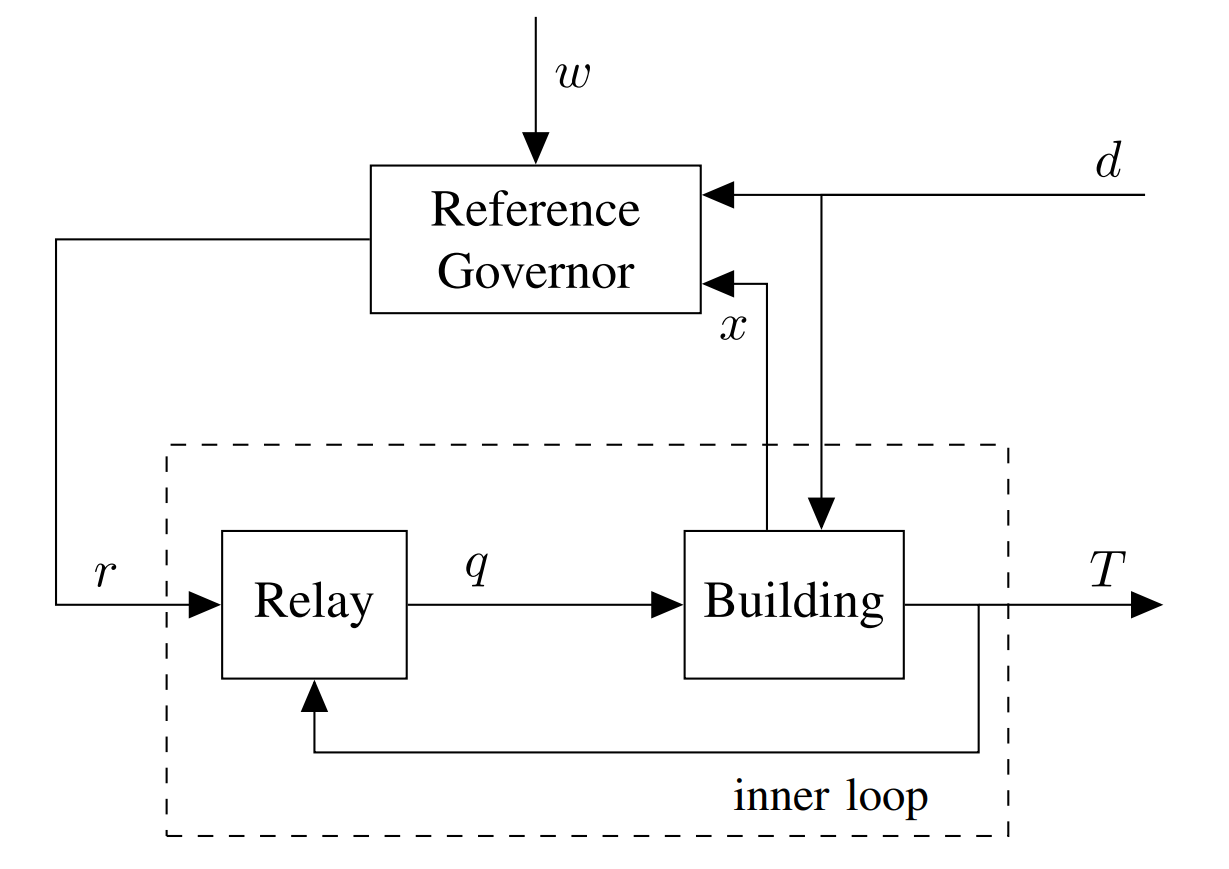 MPC-based reference governors for thermostatically controlled residential buildingsJán Drgoňa, Martin Klaučo, and Michal KvasnicaIn 2015 54th IEEE Conference on Decision and Control (CDC), Sep 2015
MPC-based reference governors for thermostatically controlled residential buildingsJán Drgoňa, Martin Klaučo, and Michal KvasnicaIn 2015 54th IEEE Conference on Decision and Control (CDC), Sep 2015@inproceedings{7402396, author = {Drgoňa, Ján and Klaučo, Martin and Kvasnica, Michal}, booktitle = {2015 54th IEEE Conference on Decision and Control (CDC)}, title = {MPC-based reference governors for thermostatically controlled residential buildings}, year = {2015}, volume = {}, number = {}, pages = {1334-1339}, doi = {10.1109/CDC.2015.7402396}, } - PCModel identification and predictive control of a laboratory binary distillation columnJán Drgoňa, Martin Klaučo, Richard Valo, and 2 more authorsIn 2015 20th International Conference on Process Control (PC), Sep 2015
@inproceedings{7169989, author = {Drgoňa, Ján and Klaučo, Martin and Valo, Richard and Bendžala, Jakub and Fikar, Miroslav}, booktitle = {2015 20th International Conference on Process Control (PC)}, title = {Model identification and predictive control of a laboratory binary distillation column}, year = {2015}, volume = {}, number = {}, pages = {357-362}, url = {https://ieeexplore.ieee.org/document/7169989}, doi = {10.1109/PC.2015.7169989} }

2014
- Building Temperature Control by Simple MPC-like Feedback Laws Learned from Closed-Loop DataMartin Klaučo, Ján Drgoňa, Michal Kvasnica, and 1 more authorIFAC Proceedings Volumes, Sep 201419th IFAC World Congress
@article{KLAUCO2014581, title = {Building Temperature Control by Simple MPC-like Feedback Laws Learned from Closed-Loop Data}, journal = {IFAC Proceedings Volumes}, volume = {47}, number = {3}, pages = {581-586}, year = {2014}, note = {19th IFAC World Congress}, issn = {1474-6670}, doi = {https://doi.org/10.3182/20140824-6-ZA-1003.01633}, url = {https://www.sciencedirect.com/science/article/pii/S1474667016416770}, author = {Klaučo, Martin and Drgoňa, Ján and Kvasnica, Michal and Cairano, Stefano Di}, keywords = {Predictive control for linear systems, Energy systems, Regression}, abs = {We show how to synthesize simple, yet well-performing feedback strategies that mimic the behavior of optimization-based controllers, such as those based on model predictive control (MPC). The approach is based on employing regression trees to derive dependence of real-valued control inputs on measurements. Quality of classical regression policies is improved by finding, simultaneously, optimal affine splits and optimal local affine regressors. We furthermore illustrate how to refine the local regressors such that the overal feedback strategy guarantees satisfaction of input constraints. The main advantage of the proposed regression-based control strategy stems from its fast implementation even on very simple hardware. The approach is demonstrated on a case study that assumes control of temperature in a one-zone building. Here, the data used in the learning process are generated by MPC. We show that the simple feedback law attains almost the same level of performance as the complex MPC controller.} }
2013
- ECCExplicit MPC of LPV systems in the controllable canonical formMichal Kvasnica, Alexander Szücs, Miroslav Fikar, and 1 more authorIn 2013 European Control Conference (ECC), Sep 2013
@inproceedings{6669341, author = {Kvasnica, Michal and Szücs, Alexander and Fikar, Miroslav and Drgoňa, Ján}, booktitle = {2013 European Control Conference (ECC)}, title = {Explicit MPC of LPV systems in the controllable canonical form}, year = {2013}, volume = {}, number = {}, pages = {1035-1040}, url = {https://ieeexplore.ieee.org/document/6669341}, doi = {10.23919/ECC.2013.6669341} } - CDCExplicit stochastic MPC approach to building temperature controlJán Drgoňa, Michal Kvasnica, Martin Klaučo, and 1 more authorIn 52nd IEEE Conference on Decision and Control, Sep 2013
@inproceedings{6760908, author = {Drgoňa, Ján and Kvasnica, Michal and Klaučo, Martin and Fikar, Miroslav}, booktitle = {52nd IEEE Conference on Decision and Control}, title = {Explicit stochastic MPC approach to building temperature control}, year = {2013}, volume = {}, number = {}, pages = {6440-6445}, url = {https://ieeexplore.ieee.org/abstract/document/6760908}, doi = {10.1109/CDC.2013.6760908} } - PCComparison of MPC strategies for building controlJán Drgoňa, and Michal KvasnicaIn 2013 International Conference on Process Control (PC), Sep 2013
@inproceedings{6581444, author = {Drgoňa, Ján and Kvasnica, Michal}, booktitle = {2013 International Conference on Process Control (PC)}, title = {Comparison of MPC strategies for building control}, year = {2013}, volume = {}, number = {}, pages = {401-406}, url = {https://ieeexplore.ieee.org/document/6581444}, doi = {10.1109/PC.2013.6581444} }